Automatic driving assistance device and method thereof
A technology for automatic driving and auxiliary devices, which is applied to measuring devices, control devices, motor vehicles, etc., and can solve problems such as large combinations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0075] use Figure 1 to Figure 11 Example 1 of the present invention will be described.
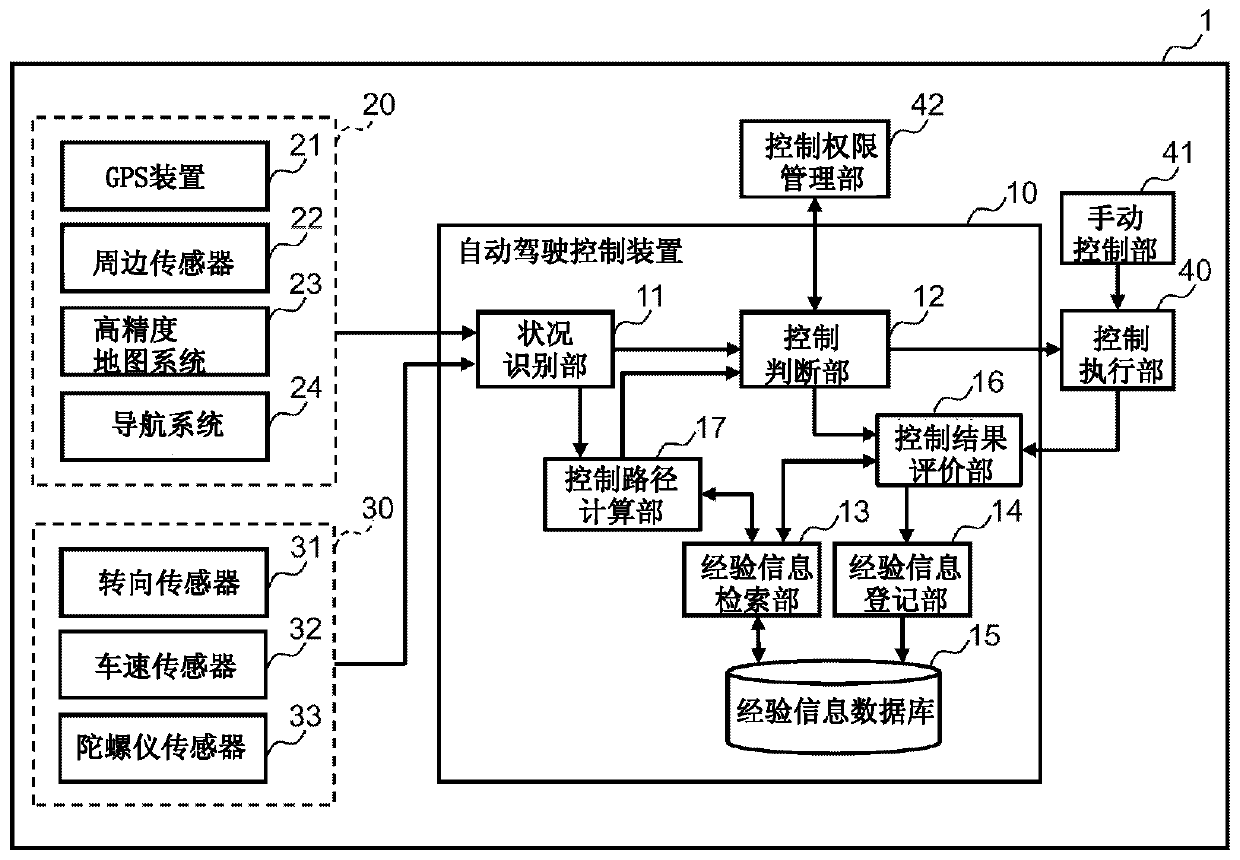
[0076] figure 1 is a structural diagram of the automatic driving system in Embodiment 1. figure 1 Among them, the automatic driving system of this embodiment includes: an automatic driving control device 10 , a sensor map information group 20 , a vehicle motion information group 30 , a control execution unit 40 , a manual control unit 41 and a control authorization unit 42 . At this time, the automatic driving system is assumed that the automatic driving control device 10 mounted in the vehicle (autonomous driving vehicle) 1 that performs automatic driving recognizes The processing executes the calculation of the control route and the determination of the control method, and notifies the determined control method to the control execution unit 40, and the control execution unit 40 executes the vehicle operation based on the notified control method, thereby providing automatic driving. I...
Embodiment 2
[0139] Below, use Figure 12 Example 2 of the present invention will be described. The difference between this embodiment and Embodiment 1 is that the experience information database is not only set in the self-driving vehicle 1 but also in the data center, and the self-driving vehicle performs automatic driving while communicating with the data center. In this case, all vehicles share the experience information database of the data center. As an advantage, experience information that is not included in the experience information database in the own vehicle can be provided from the data center to each vehicle, and the control route calculation unit can calculate a more accurate control route.
[0140] Figure 12 It is a configuration diagram showing a configuration example of the automatic driving system of the second embodiment. Compared with the structure of the automatic driving system of Embodiment 1, the automatic driving system of Embodiment 2 adds an experience infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com