

Oil field dynamic intrusion target tracking system and method based on multiple unmanned aerial vehicles
A target tracking and multi-UAV technology, which is applied in the field of UAV inspection and dynamic prediction and tracking, and can solve the problems of small organizational structure, limited UAV battery life, and inability to install stable sensor observation platforms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
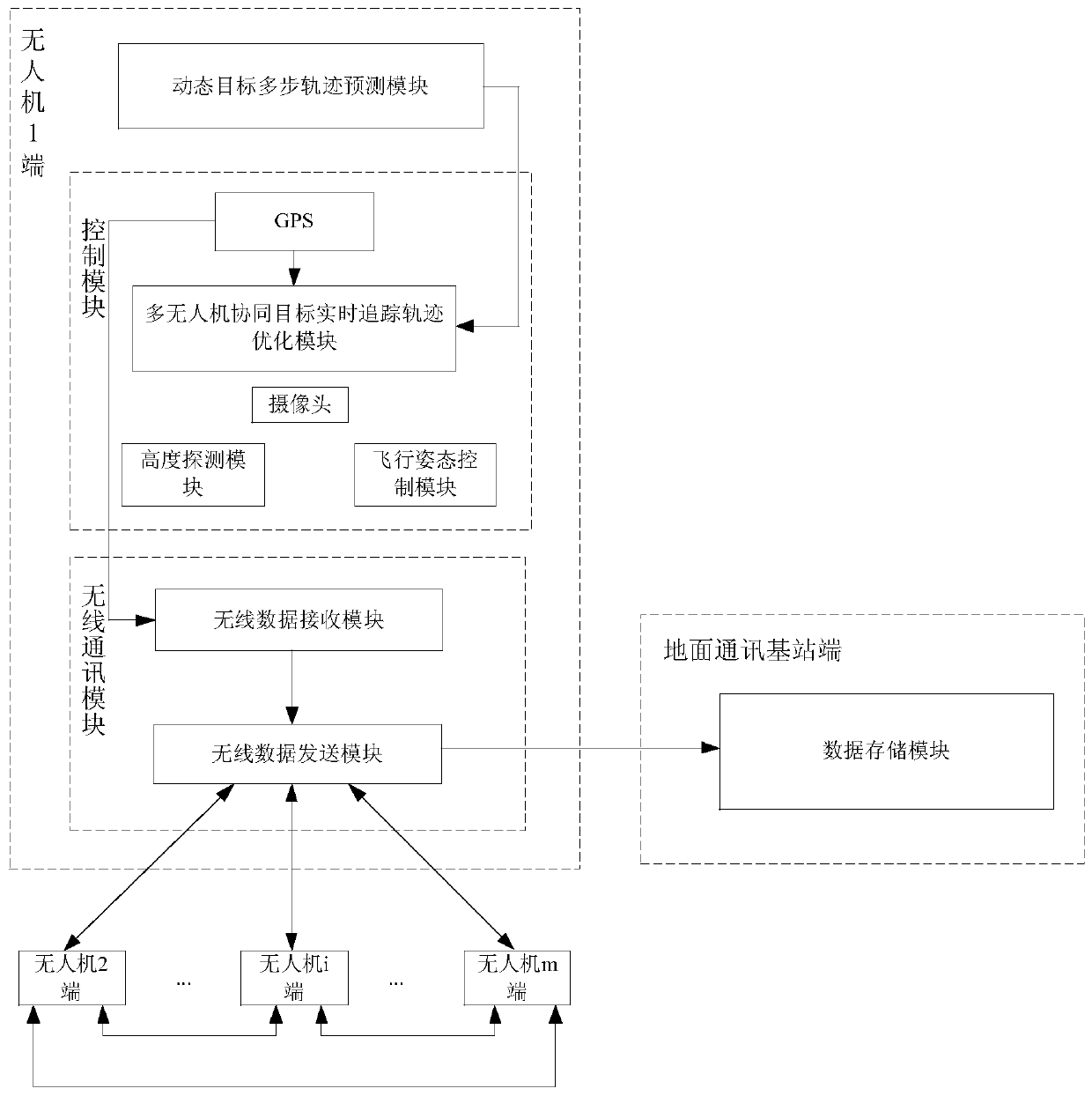
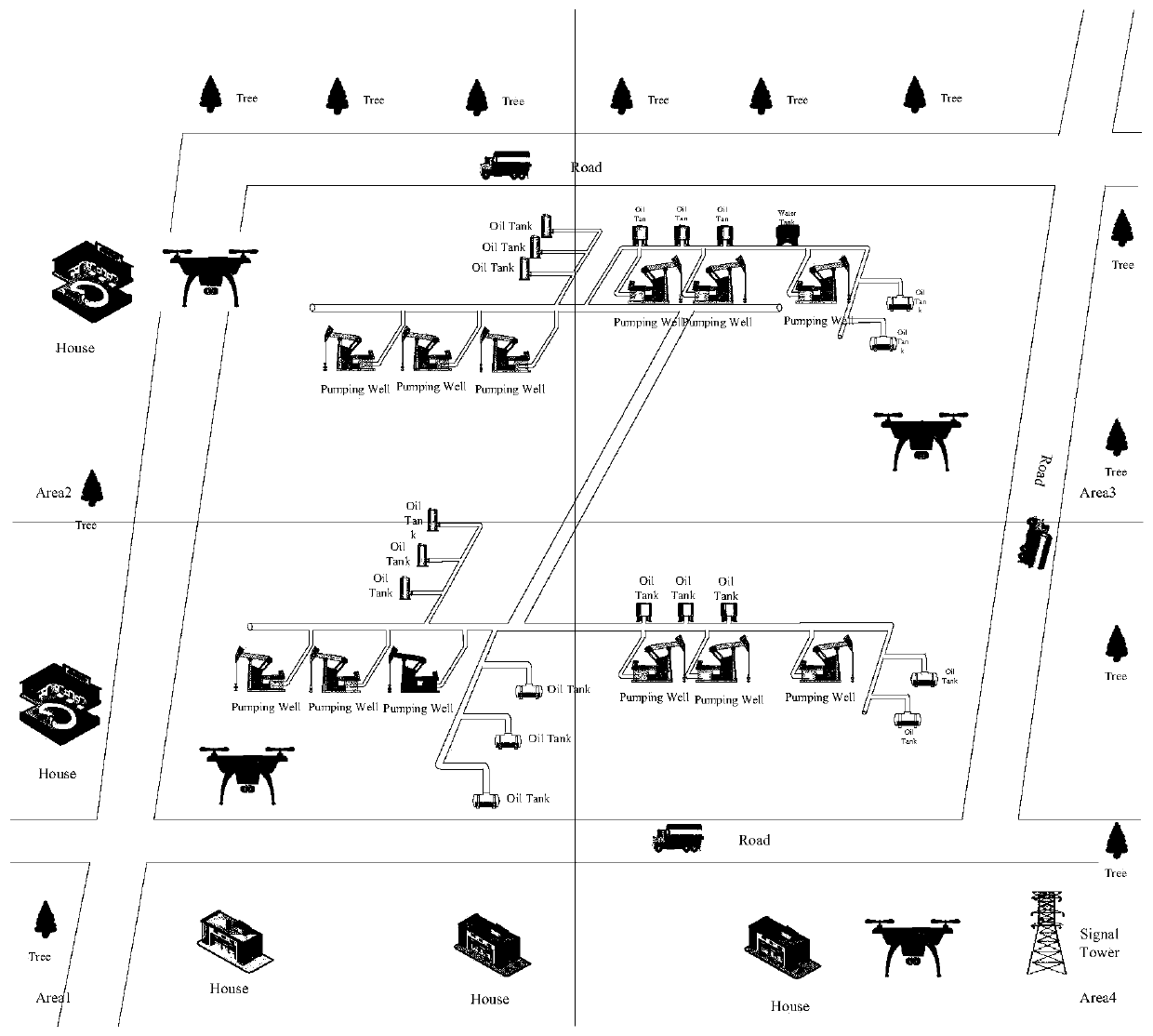
[0076] On the one hand, the present invention provides a multi-UAV based oil field dynamic invasion target tracking system, the system structure schematic diagram is as follows figure 1 As shown, the application scenario and composition diagram are as follows figure 2 As shown, the system includes a control module, a monitoring module, a dynamic target trajectory prediction module and a multi-machine cooperative target tracking trajectory optimization module;
[0077] The control module includes a flight height detection module, a flight attitude control module and a wireless communication module;
[0078] The flight height detection module is installed on the UAV, and its output terminal is connected with the flight attitude control module for detection and control of the flight height during real-time flight, so that the UAV is always ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More