

Unmanned aerial vehicle, and distributed time-sharing control system and method for distribution unmanned aerial vehicle
A technology of time-sharing control and unmanned aerial vehicles, which is applied in control/regulation systems, non-electric variable control, unmanned aircraft, etc., and can solve problems such as incomplete databases
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
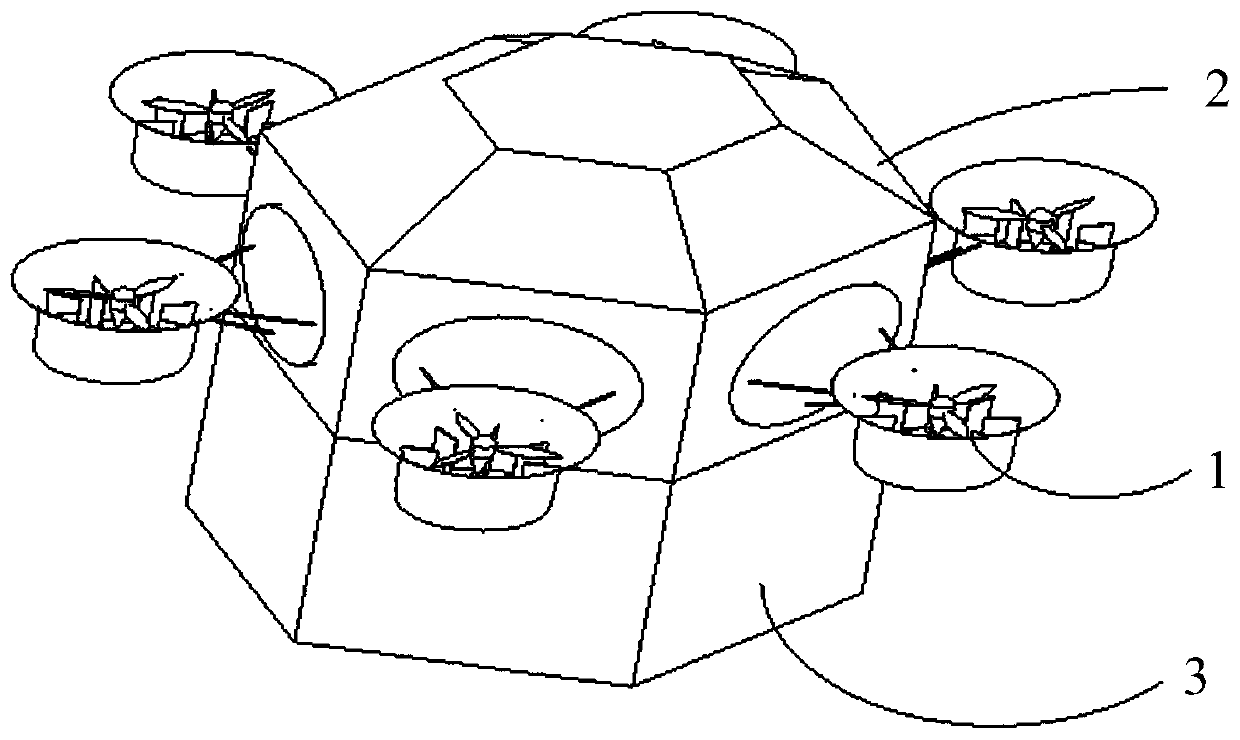
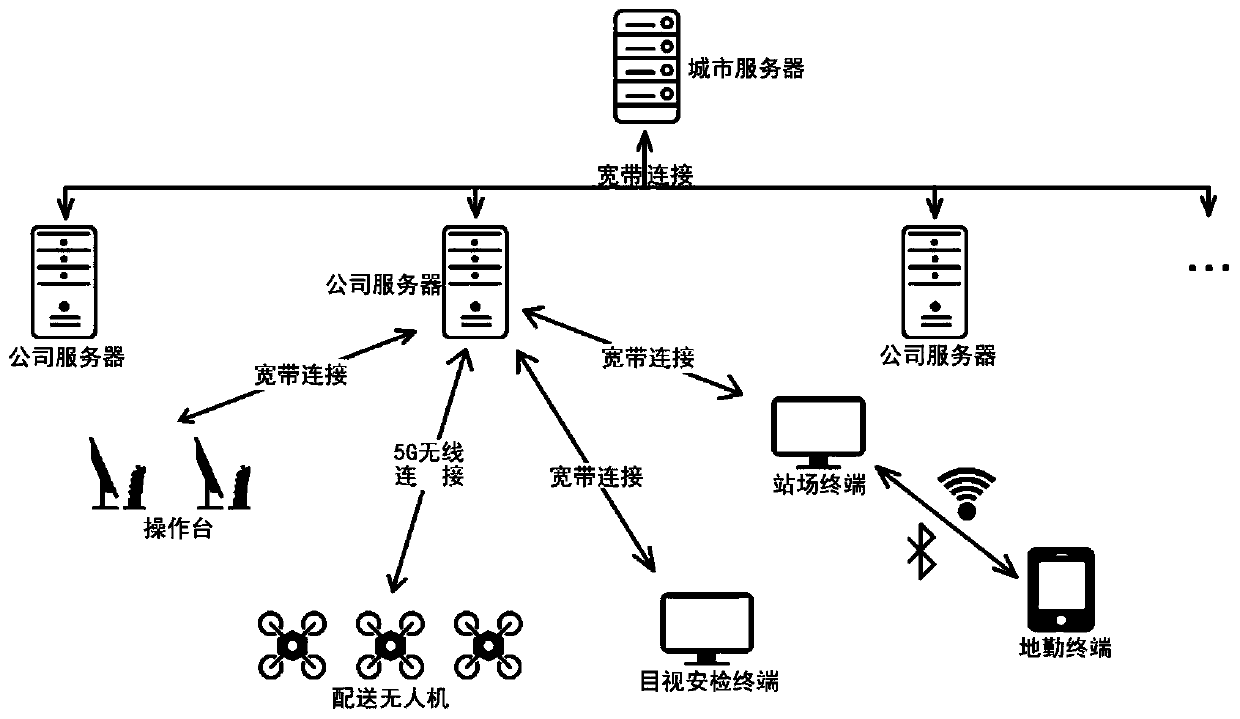
[0129] A distributed time-sharing control system for distribution drones, referred to as the honeycomb system, its work flow is as follows when executing the express pick-up task chain:
[0130] Step 1 includes: the customer places an order, provides the pick-up address, the contact information of the sender, and generates a task chain number;
[0131] Step 2 includes: the company server searches for the "standby" drone closest to the sender, and pairs the drone number with the task chain number, and the status of the drone becomes "occupied";
[0132] Step 3 includes: the company server planning module plans the route, and generates a task chain according to the final goal;
[0133] The company server planning module issues the "automatic take-off mission" to the company server driving module, the company server applies for an air route to the city server, and the air route is approved, the company server driving module drives the drone to perform the "automatic take-off miss...
Embodiment 2
[0158] A distributed time-sharing control system for distribution drones, the workflow of which executes the express delivery task chain is as follows:
[0159]Step 1 includes: the ground staff receives the package to be delivered from the logistics system, enters the recipient's contact information and delivery address provided by the customer into the company's server planning module, generates a task chain number, and the ground staff contacts the recipient to confirm the delivery People can receive mail;
[0160] Step 2 includes: the ground crew loads the package to be delivered into the fully charged warehouse, installs the warehouse containing the goods corresponding to the mission chain on an idle drone and places it in a position where it can take off, and then connects the mission chain to the warehouse. The UAV is paired up, the status of the UAV changes to "Occupied", and the ground crew confirms that the mission continues;
[0161] Step 3 includes: the company ser...
Embodiment 3
[0178] A distributed time-sharing control system for delivery drones, the workflow of which is as follows when executing the food delivery business task chain:
[0179] Step 1 includes: the merchant places an order, provides the merchant address, merchant name, delivery address, consignee contact information, and the server planning module generates a task chain number;
[0180] Step 2 includes: the company's server searches for the "standby" drone closest to the merchant, and pairs the drone number with the task chain number, and the status of the drone becomes "occupied"; the server planning module plans the route, according to the merchant's Address and delivery address generation task chain;
[0181] Step 3 includes: the company server planning module issues an "automatic take-off task" to the company server driving module, the company server applies for an air route to the city server, and the air route is approved;
[0182] The company's server driving module drives the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More