

Intelligent medical robot for lower limb rehabilitation therapy
A rehabilitation therapy and intelligent medical technology, applied in the field of medical devices, can solve the problems of unfavorable rehabilitation therapy, patients' failure to give full play to their self-consciousness, and many auxiliary operation procedures, so as to reduce auxiliary operation procedures and facilitate intelligent and flexible operation. , the effect of increasing comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The structure of the present invention will be further described below in conjunction with the preferred specific embodiments of the present invention with accompanying drawings.
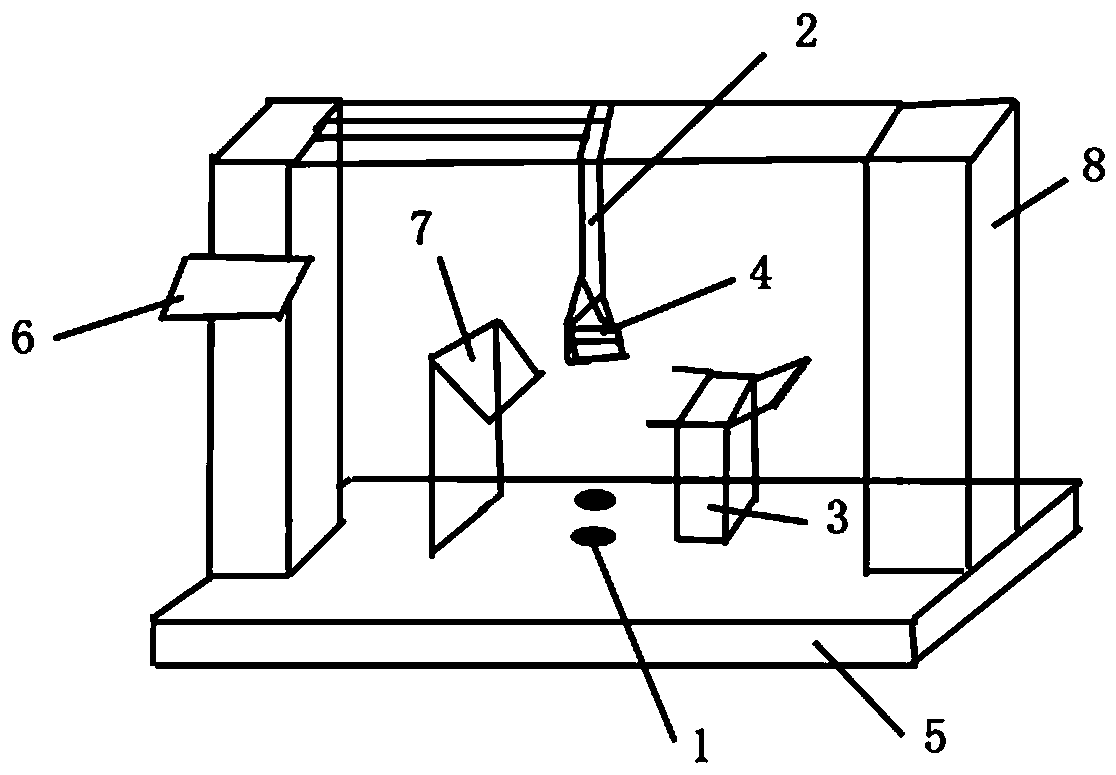
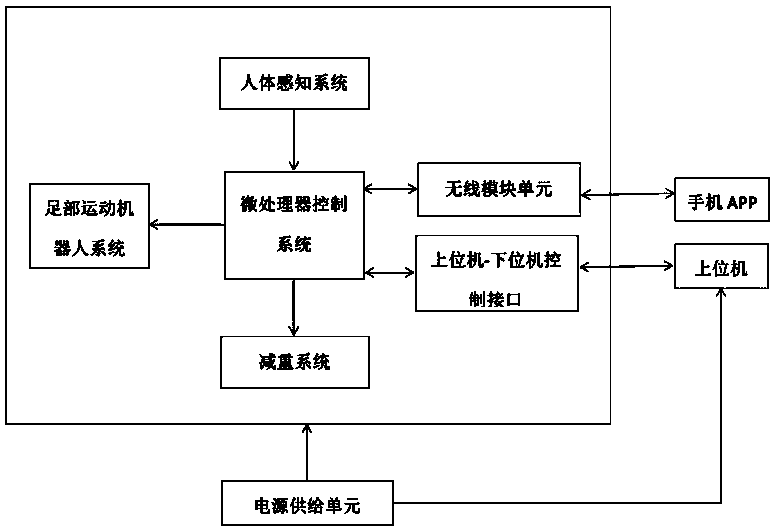
[0032] refer to figure 1 with figure 2 As shown in , the intelligent medical robot for lower limb rehabilitation disclosed by the present invention, in addition to the foot movement robot system, also includes: support system, weight loss system, human body perception system, microprocessor control system and upper machine control system.
[0033] The foot movement robot system 1 can adopt any type of foot movement robot system of the existing intelligent medical robot for lower limb rehabilitation treatment; it includes an active training mode to assist patients in sitting training and standing training, or a passive training mode Foot locomotion robotic system to assist patients in seated training.
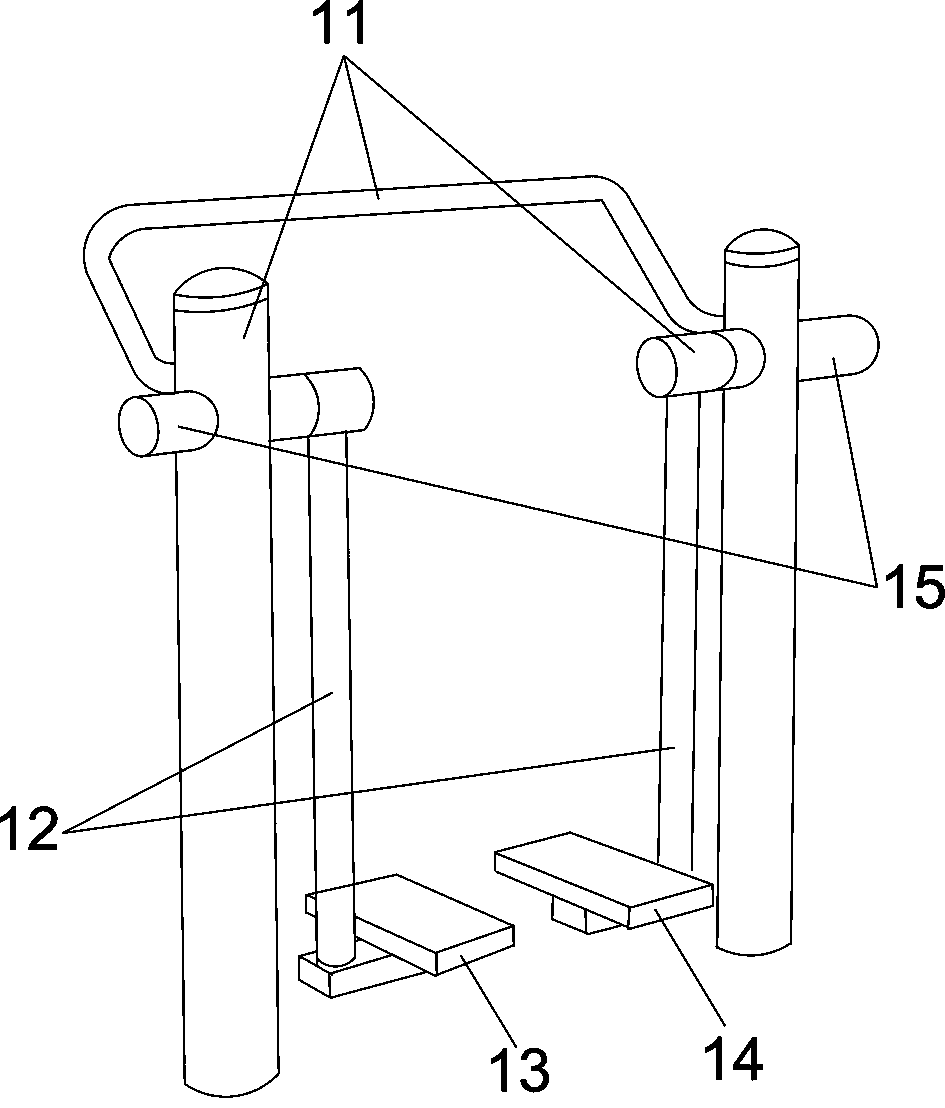
[0034] The support system is mainly used to provide installation and fixation for the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More