

Robot control system and method based on memristor intersection array
A cross-array and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of high complexity, slow response, high power consumption, and achieve the effect of reducing complexity, simplifying structure, and reducing power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
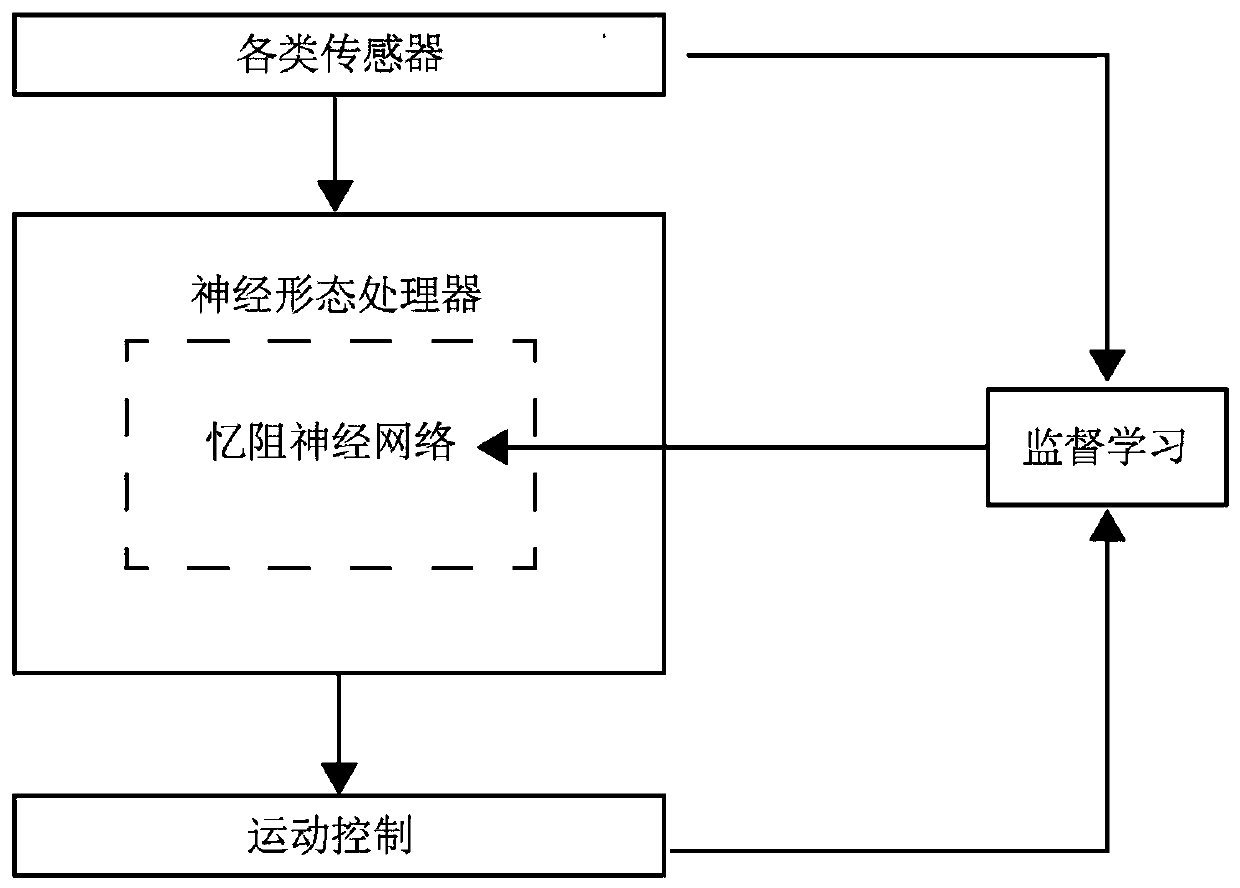
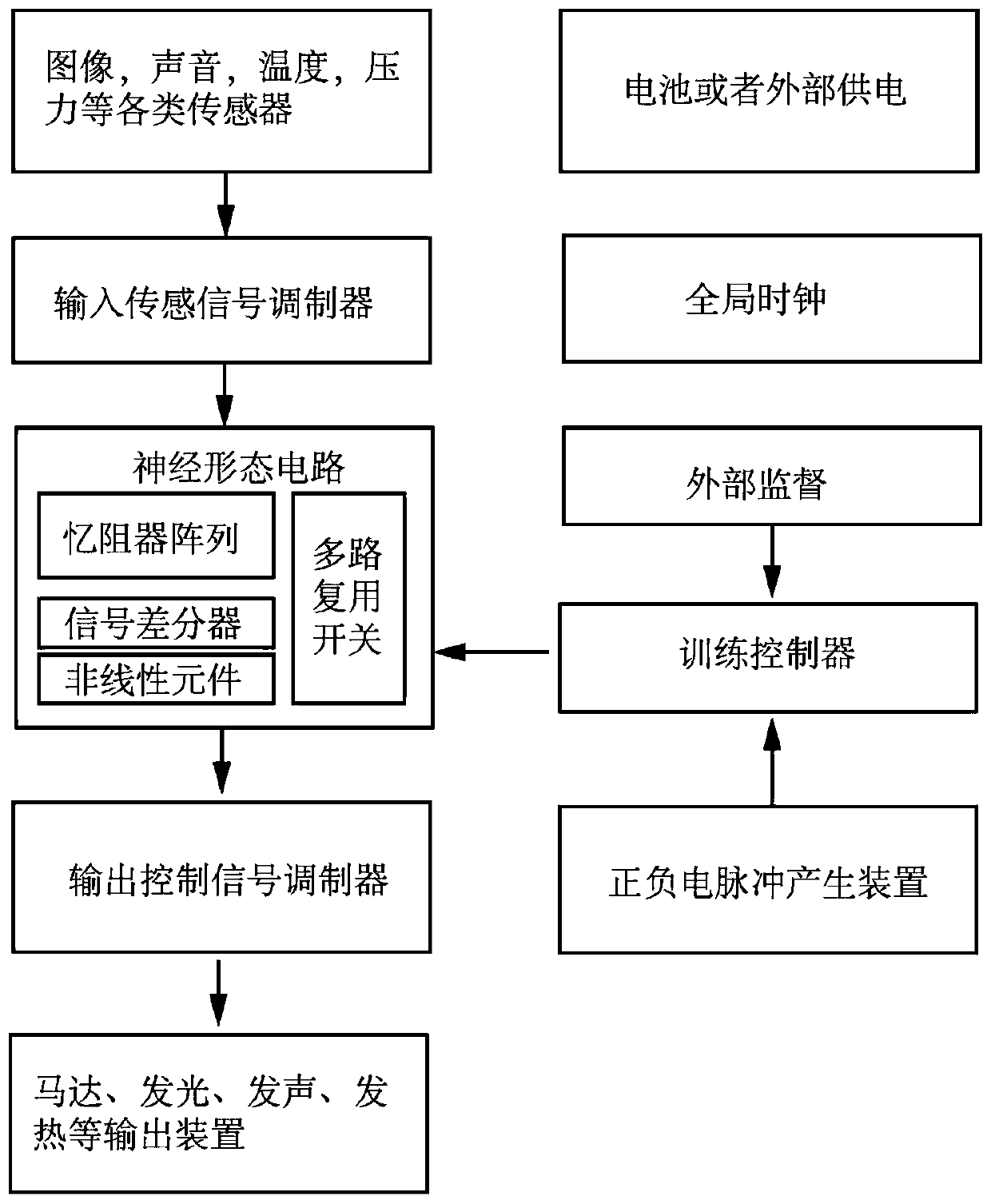
[0049] The robot control system based on the memristive cross array provided by the present invention includes a sensor group, an input sensing signal modulator, a neuromorphic circuit, an output control signal modulator, an output device, an external supervision module and a training controller, and the neuromorphic The circuit includes N sets of cascaded memristor circuits, and the memristor circuit includes a memristor cross array, a differential amplifier circuit, and a multiplexing switch, where N≥1, specifically:
[0050] Sensor groups, image, sound, temperature, pressure and other sensors complexly detect relevant information in the environment, and convert the corresponding physical quantities in the environment into electrical quantities; the sensors in this system can be any type and any number of sensors, optical , Electrical, pressure, temperature, sound sensors.
[0051] The input sensing signal modulator is used to amplify the electrical quantity transmitted by e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More