

Target situation fusion sensing method and system based on multiple sensors
A target situation and multi-sensor technology, applied to instruments, details involving 3D image data, image data processing, etc., can solve problems such as difficulty in determining prior probability, lack of sample randomness, and insufficient capacity of a single platform
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
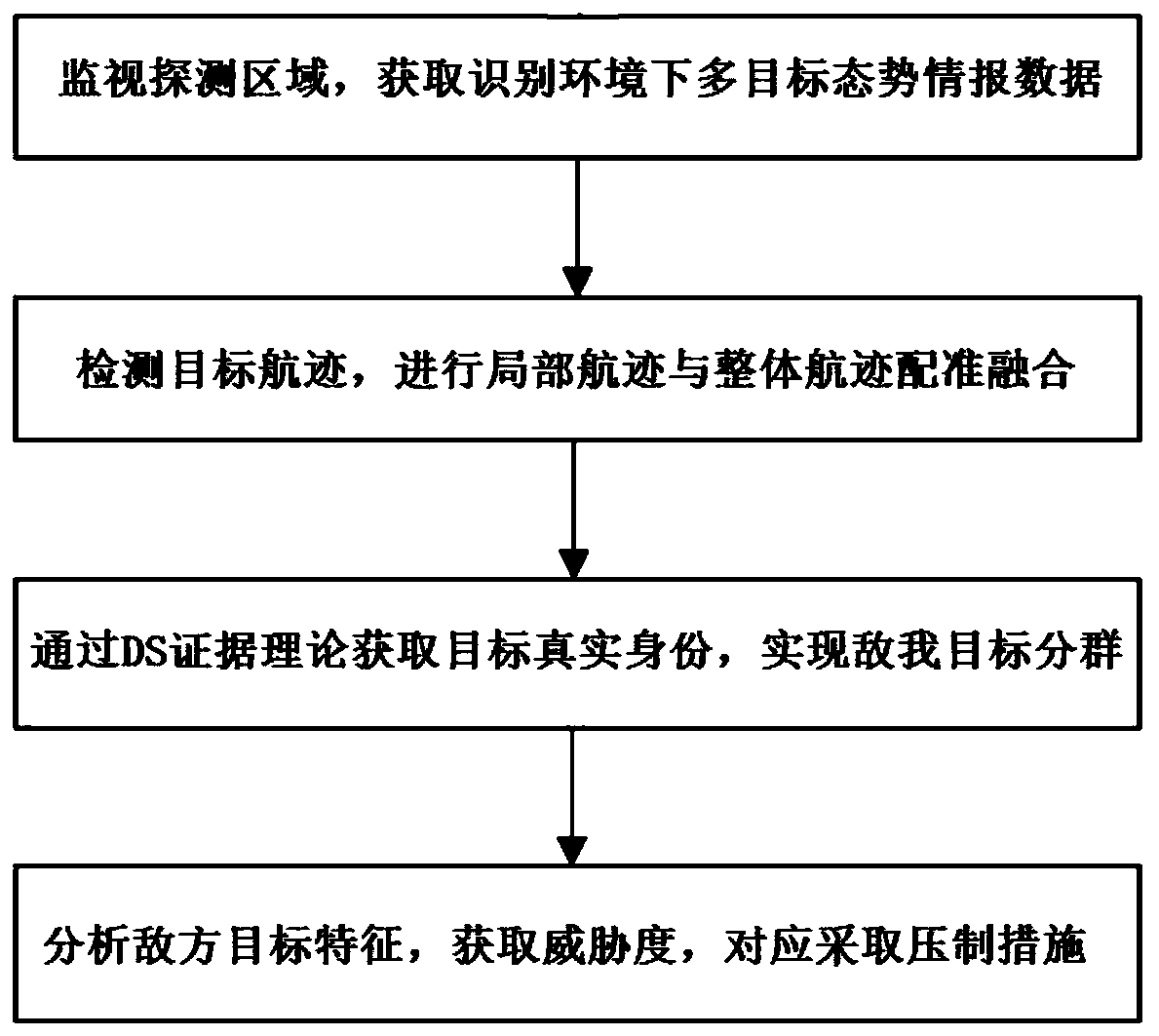
[0081] figure 1 It is a flow chart of the realization of a multi-sensor based target situation fusion perception method of the present invention, which mainly includes: monitoring the detection area, obtaining multi-target situation intelligence data in the recognition environment; detecting the target track, performing local track fusion and overall track matching Quasi-fusion; obtain the true identity of the target through the DS evidence theory, and realize the target grouping of the enemy and the enemy; finally, by analyzing the characteristics of the enemy target, obtain the threat level, and take corresponding suppression measures.
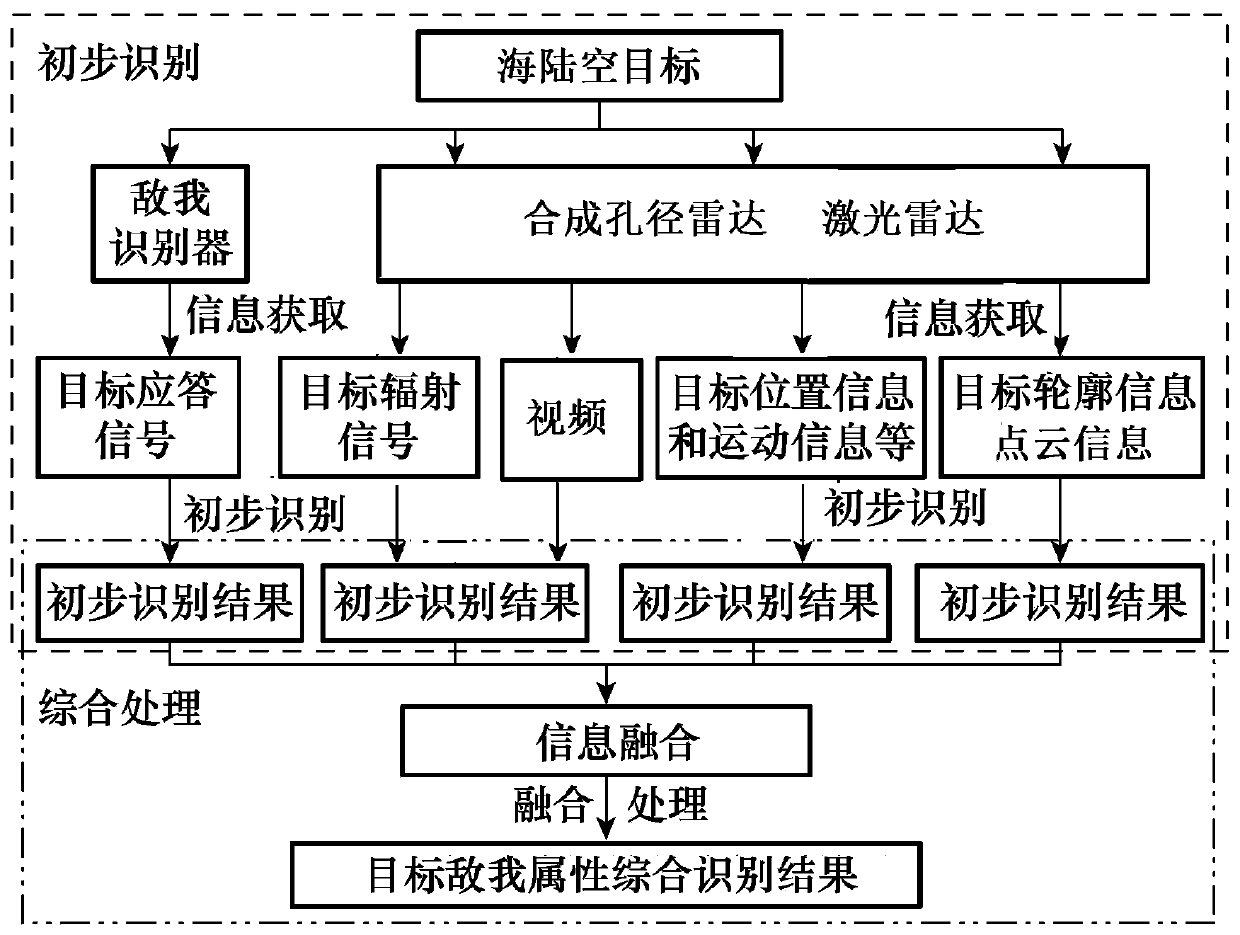
[0082] figure 2 It is a flow chart of prelim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More