

Arresting gear for small-volume logistics unmanned aerial vehicle and control method of arresting gear
A shutdown device and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve problems such as waste of space and resources, inconvenient handling, deviation of landing position, etc., to improve the safety and life of use, avoid interference or impact, and reduce volume Bigger effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
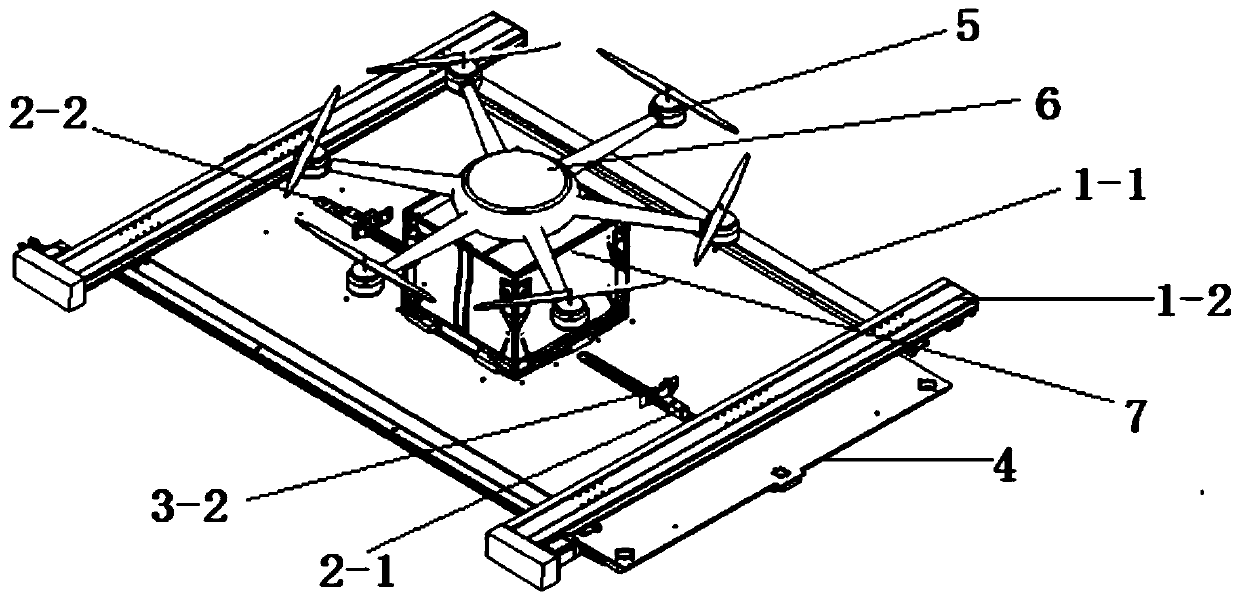
[0039] A parking device for a small-volume logistics unmanned aerial vehicle, including a platform body 4 with a parking area in the center, a front and rear alignment mechanism 1, a left and right alignment mechanism 2, and a parking device for controlling the logistics UAV 6. The paddle positive positioning mechanism 5 with the smallest floor space can be achieved at the same time;
[0040] The front and rear alignment mechanism 1 includes two push plates 1-1 arranged on the upper surface of the platform body 4, located on the front and rear sides of the parking area, and driven to move forward and backward;
[0041] The left and right positive positioning mechanism 2 includes two push blocks 2-1 arranged on the upper surface of the platform body 4, located on the left and right sides of the parking area, and driven to move in opposite directions on the left and right;
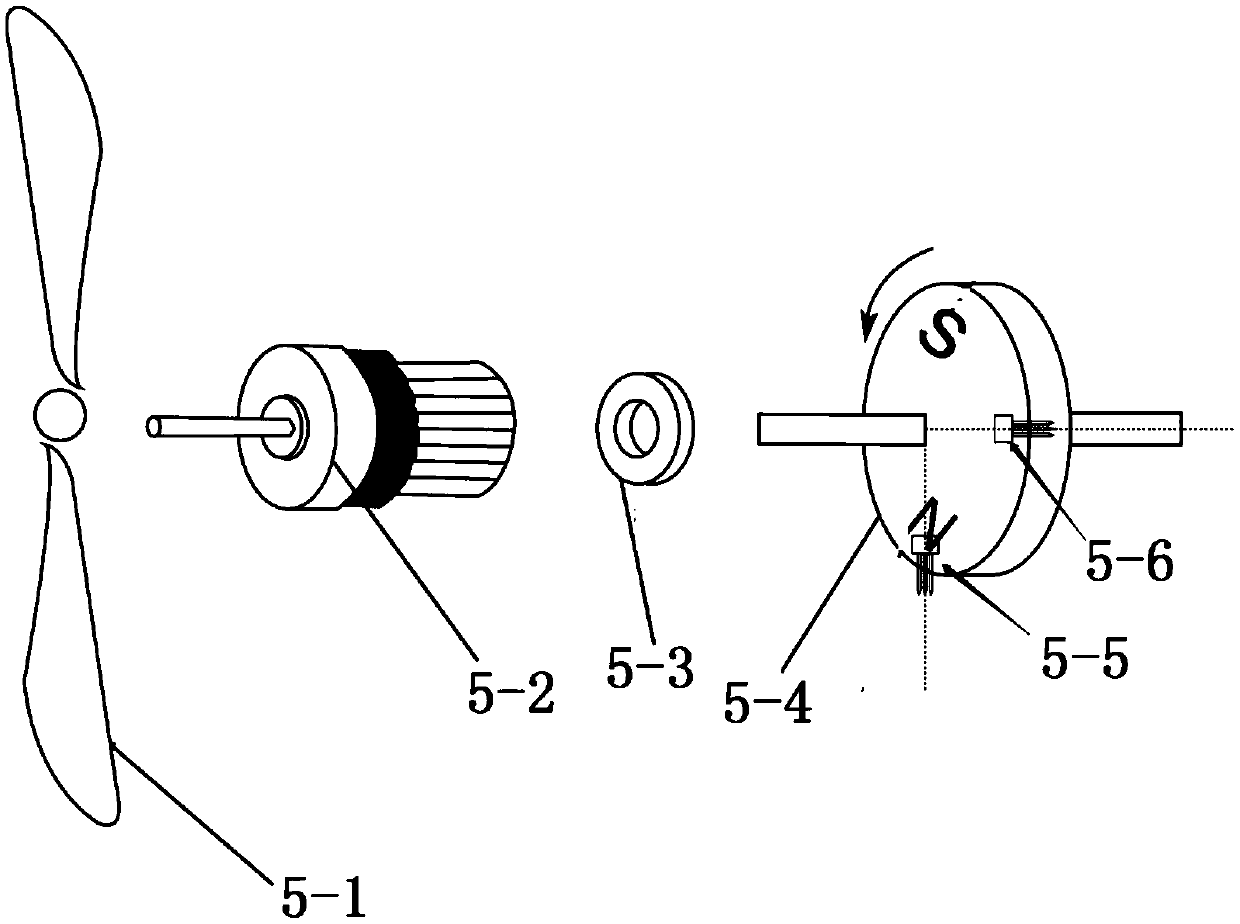
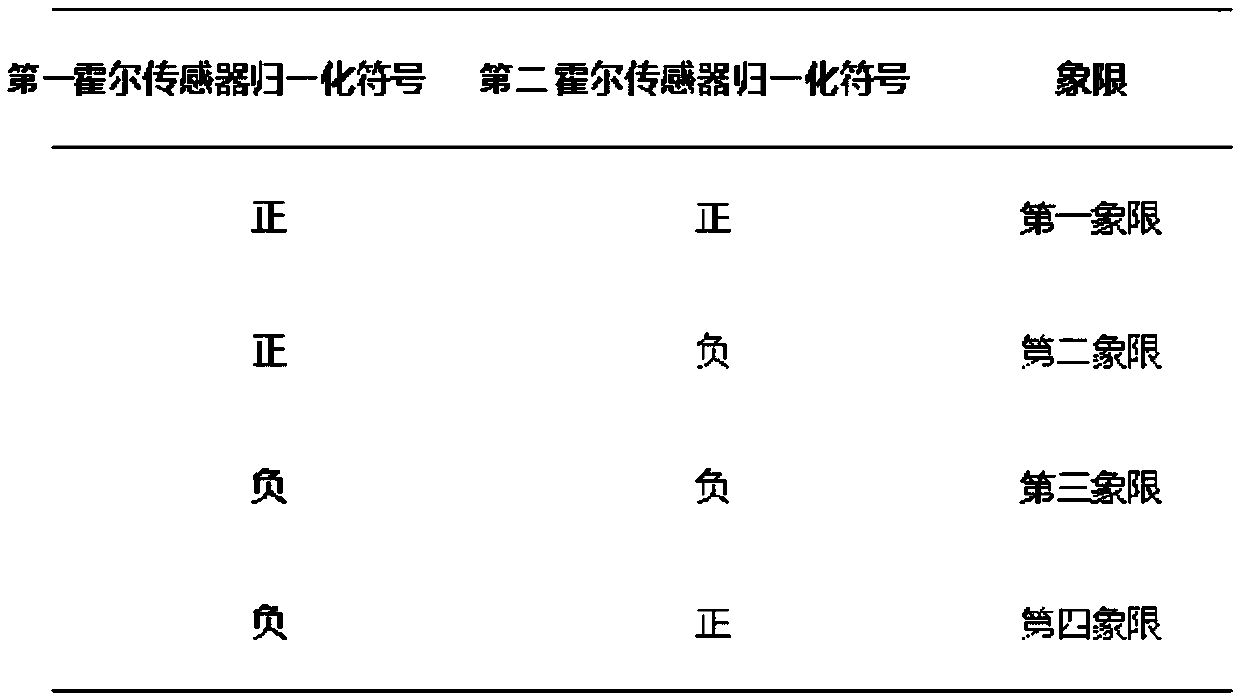
[0042] The blade normalization mechanism 5 includes a blade position detection mechanism for detecting th...
Embodiment 2
[0048] Based on Embodiment 1, in order to ensure the centered position of the logistics drone 6, the platform body 4 is provided with a limit mechanism for ensuring the normal position of the logistics drone 6. The first position sensor on the first lead screw drive mechanism 1-2 and two second position sensors respectively arranged on the two second lead screw drive mechanisms 2-2, two first position sensors and two second position sensors The position sensors are all communicated with the controller, wherein the two first position sensors are used to limit the initial positions of the two ends of the two push pedals 1-1 respectively (the two push pedals 1-1 are in the process of moving The logistics UAV 6 can be promoted to realize the front and rear centering position), and the limit signal is transmitted to the controller, and the controller stops the work of the first lead screw drive mechanism 1-2 correspondingly according to the received limit signal, The two push plate...
Embodiment 3
[0052] Preferably, it also includes a charging mechanism for charging the logistics drone 6, and the charging mechanism 3 can also be set to include two charging seats respectively arranged on both sides of the warehouse 7 and used for charging the logistics drone 6 3-1 and two charging connectors 3-2 respectively installed on the two push blocks 2-1 and corresponding to the two charging bases 3-1 one by one, and the two charging connectors 3-2 are connected to the power supply. Adopting two charging bases 3-1 can ensure that when a problem occurs in one of the charging bases 3-1, it can still be charged normally. The two plug connectors also enable the separate arrangement of positive and negative poles.
[0053] The small-volume logistics drone 6 of the present invention uses a shutdown device. The logistics drone 6 has a simple structure and is easy to use. The paddle blades are positioned by the paddle blade alignment mechanism and then the push plate 1-1 and the push bloc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More