Pneumatic muscle driven modularized exoskeleton elbow-wrist rehabilitation robot
A rehabilitation robot and pneumatic muscle technology, applied in the field of rehabilitation robots, can solve the problems of not considering equipment utilization, poor compliance and safety, waste of equipment resources, etc., and achieve increased practicability and applicability, high safety and flexibility. , joint motion independent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
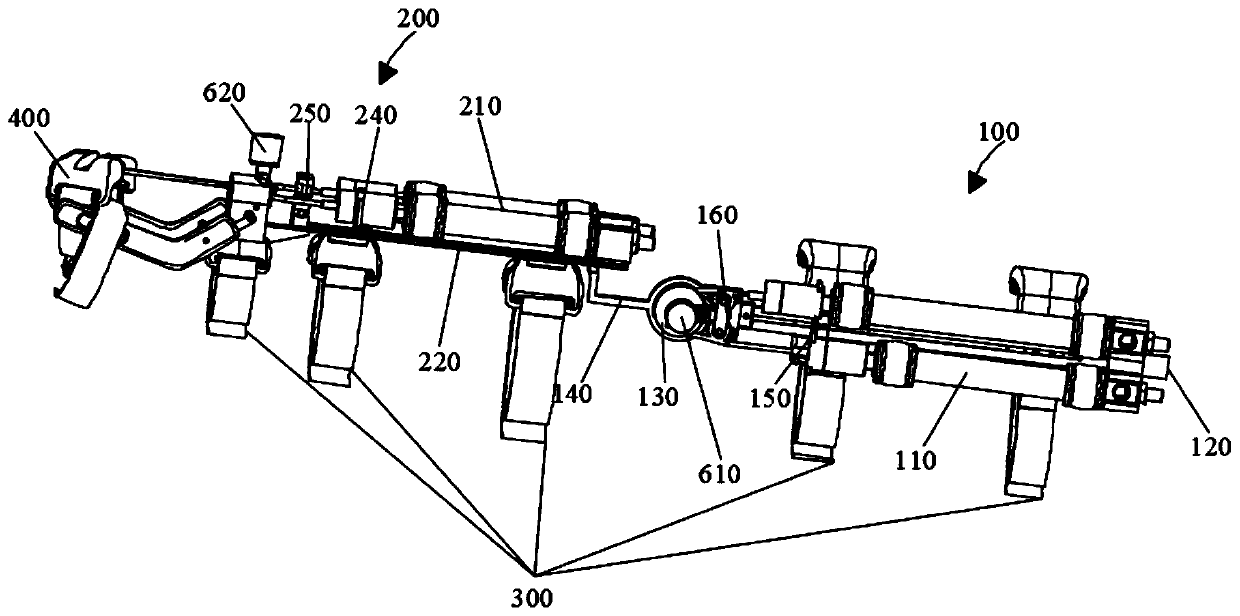
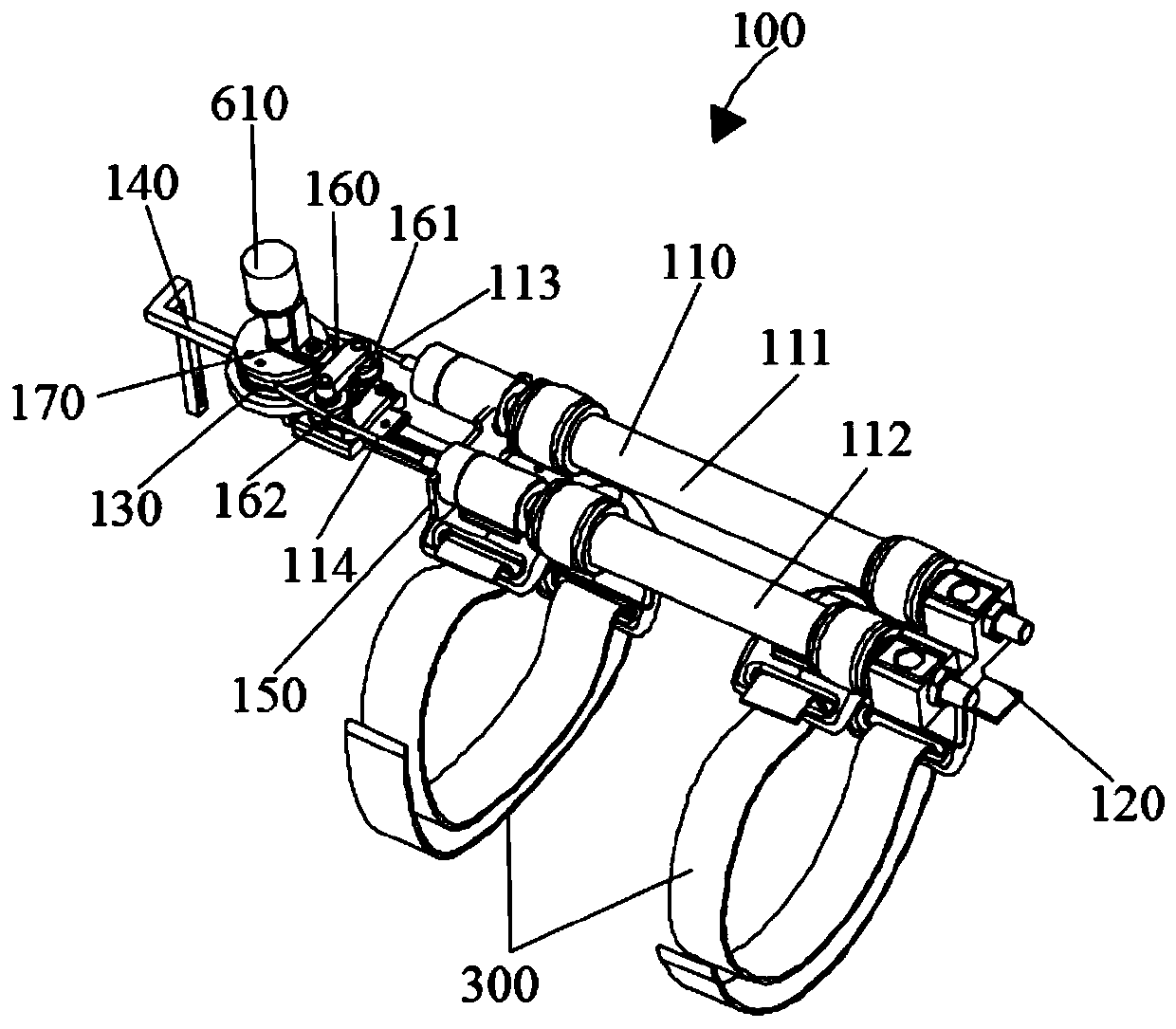
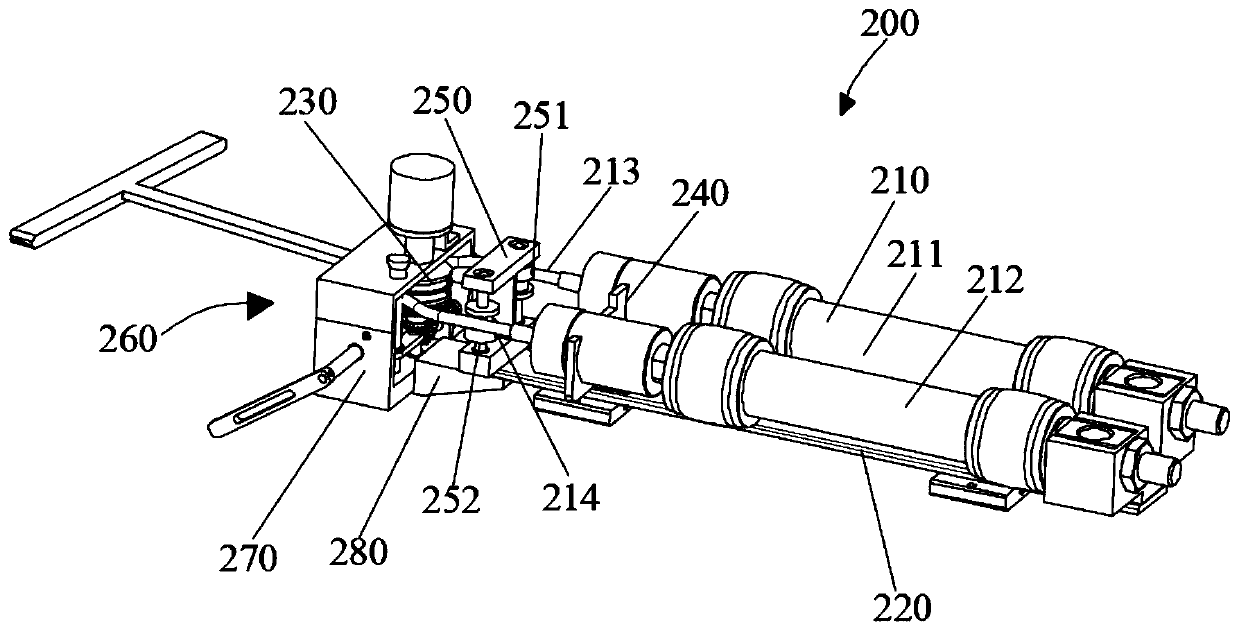
[0040] refer to Figure 1-Figure 6 As shown, a pneumatic muscle-driven modular exoskeleton elbow-wrist rehabilitation robot includes an elbow rehabilitation module 100 , a wrist rehabilitation module 200 , an arm brace module 300 and a wrist brace module 400 . A plurality of arm brace modules 300 are detachably installed on the elbow rehabilitation module 100 for connecting the patient's upper arm with the elbow rehabilitation module 100 to help patients train their elbows. Multiple arm brace modules 300 and wrist brace modules The tool module 400 is detachably installed on the wrist joint rehabilitation module 200 for connecting the patient's forearm, hand and wrist joint rehabilitation module 200 to help the patient train the wrist.
[0041] refer to figure 1 with figure 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com