

Upper limb wearable transfer robot motion recognition system based on multi-signal fusion
A technology of robot motion and recognition system, applied in the field of intention recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0080] The multi-signal fusion-based motion recognition system of the wearable upper limb carrying robot of the present invention includes a sensor system and a data processing system. In this embodiment, the system of the present invention is used for the upper limb exoskeleton robot to assist the wearer to complete lifting and carrying actions.
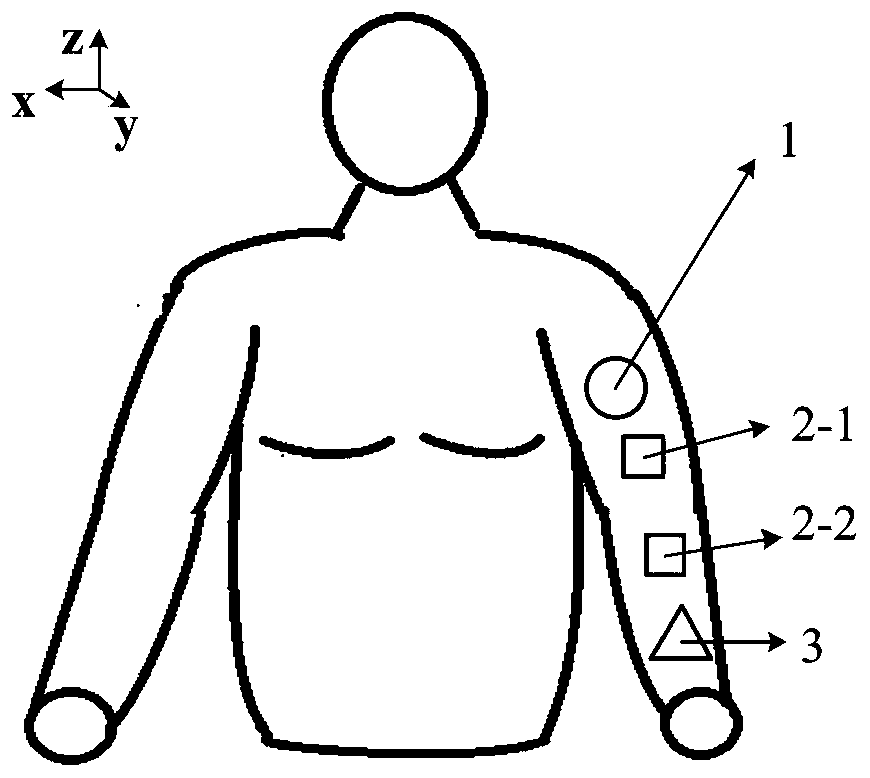
[0081] Such as figure 1 As shown, the sensor system includes a surface dry electrode electromyography sensor 1, a six-axis inertial sensor, and a silicone airbag 3; the six-axis inertial sensor includes a forearm six-axis inertial sensor 2-2 and an upper arm six-axis inertial sensor 2-1.
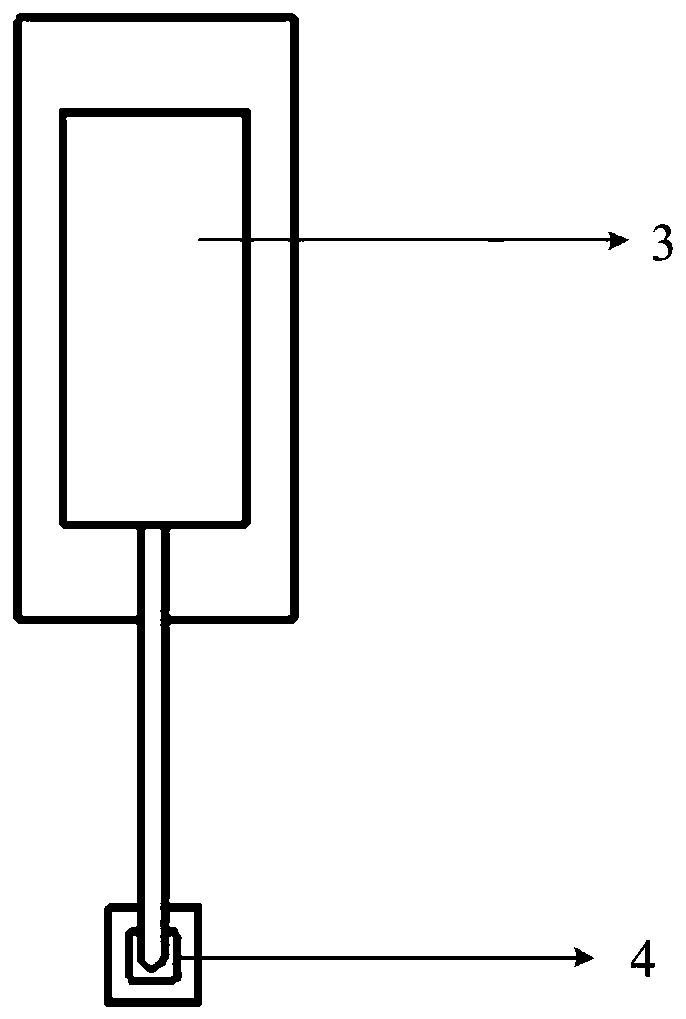
[0082] Such as figure 2 As shown, an air pressure sensor 4 is connected to one end of the silicone airbag 3 .
[0083] Among them, the surface dry electrode electromyographic sensor 1 is installed on the upper ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More