

AUV intelligent motion observation method based on data driving
It is a data-driven and intelligent technology, which is applied in the directions of measuring devices, surveying and navigation, and open-air water source survey. It can solve problems such as difficult to obtain observation data of marine phenomena and affect the application prospects of AUV, and achieve important scientific significance and application value, and the speed is fast. , the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The specific content and function realization process of the present invention will be explained in detail below in conjunction with the accompanying drawings.
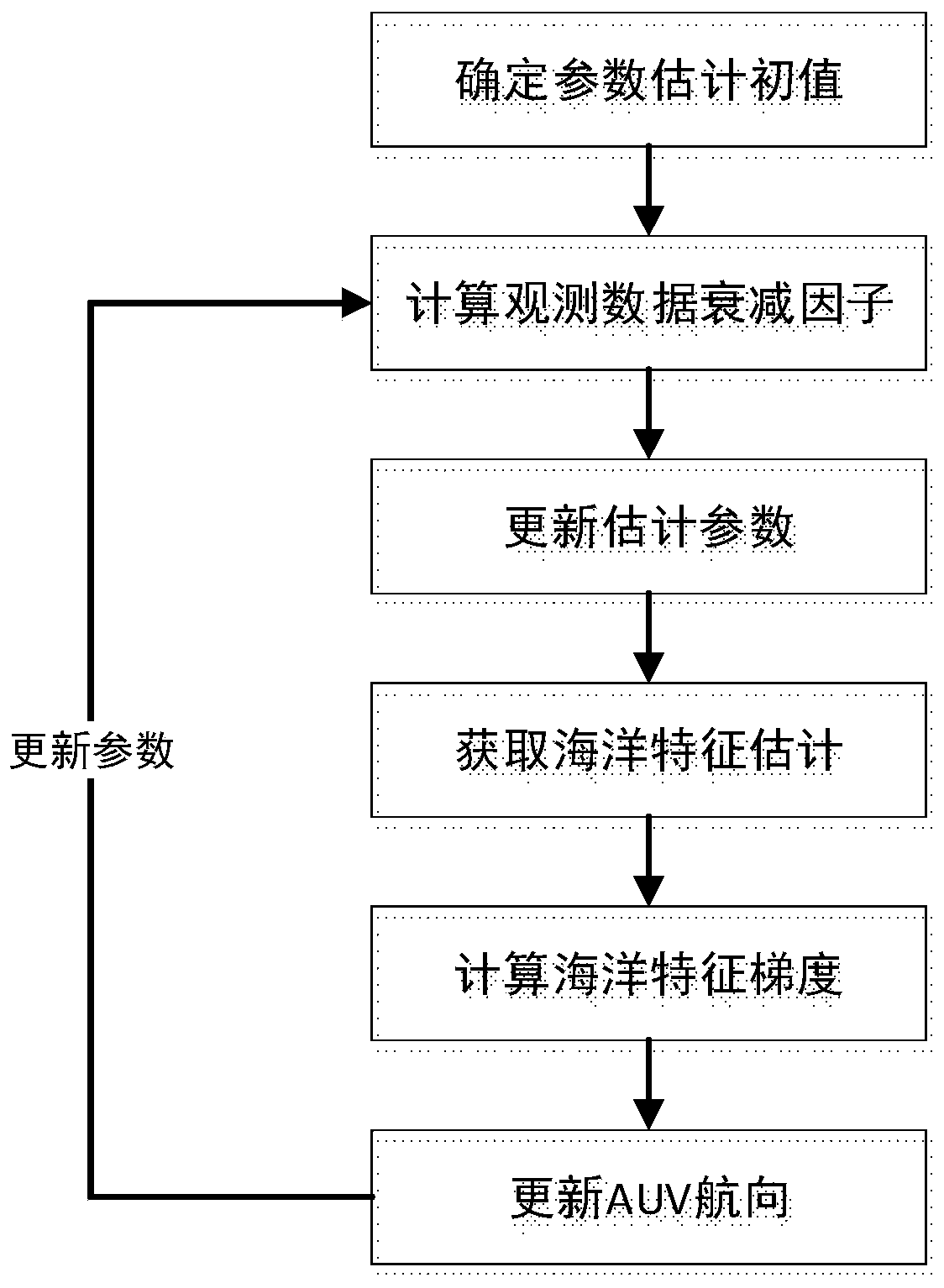
[0051] Such as figure 1 Shown, specific embodiment of the present invention and its implementation process are as follows:
[0052] Such as figure 1 As shown, the specific implementation of the present invention includes determining the initial value of the ocean characteristic estimation parameter, determining the attenuation factor, updating the estimated parameter, updating the ocean characteristic estimation, obtaining the ocean characteristic gradient, and updating the AUV heading. Driven by new observation data, The AUV can reach the center of the ocean feature with the optimal observation path.
[0053]First, the AUV carries corresponding sensors to randomly collect some ocean observation data in the observation area, and obtains the initial estimate of the ocean observation data through the formula ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More