

Robot constant-force polishing machining parameterized programming method based on UG NX secondary development
A secondary development and processing parameter technology, applied in the field of programming, can solve problems such as imperfection, complexity, and high manufacturing costs, and achieve the effects of overcoming poor versatility, high programming efficiency, and good processing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
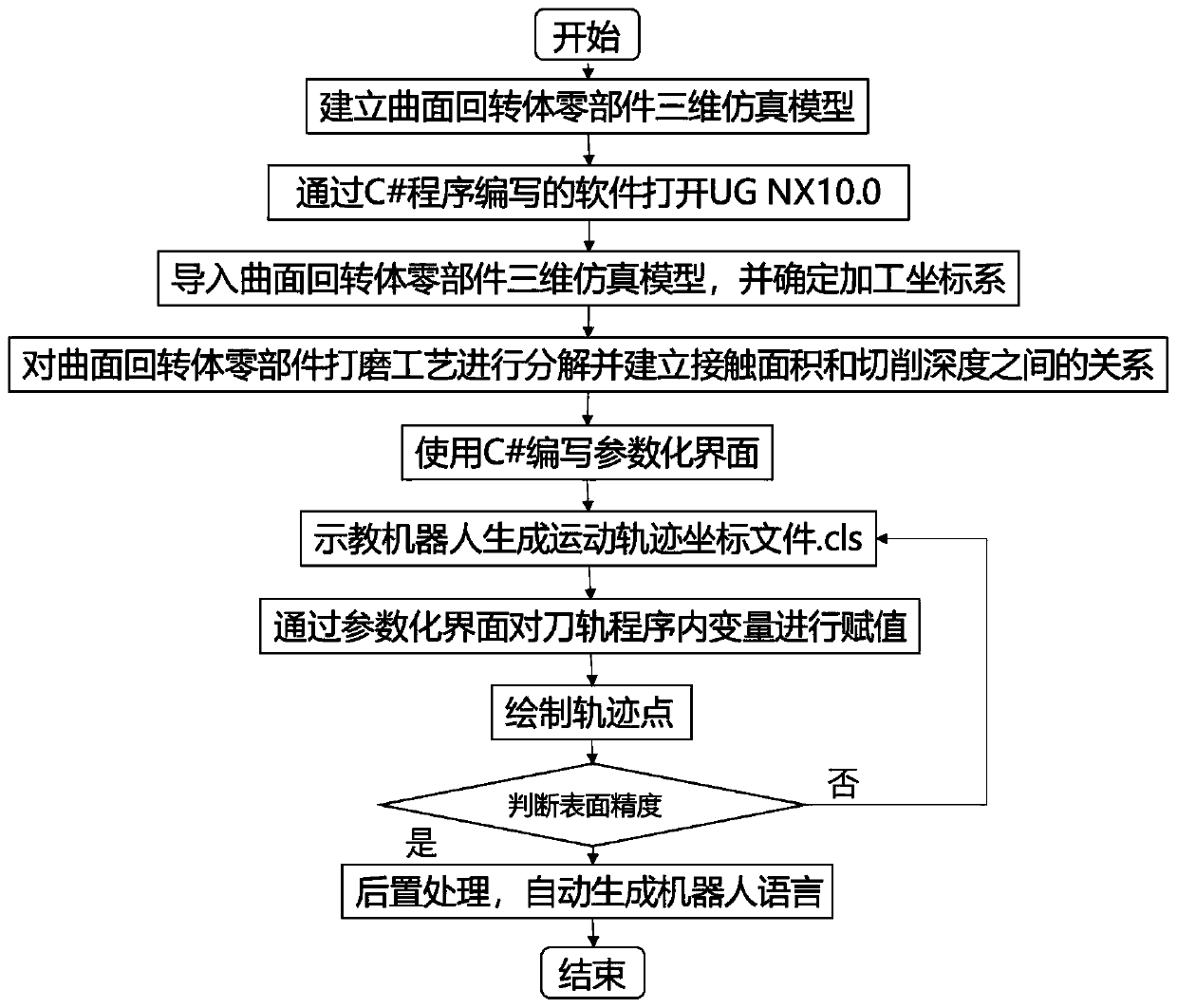
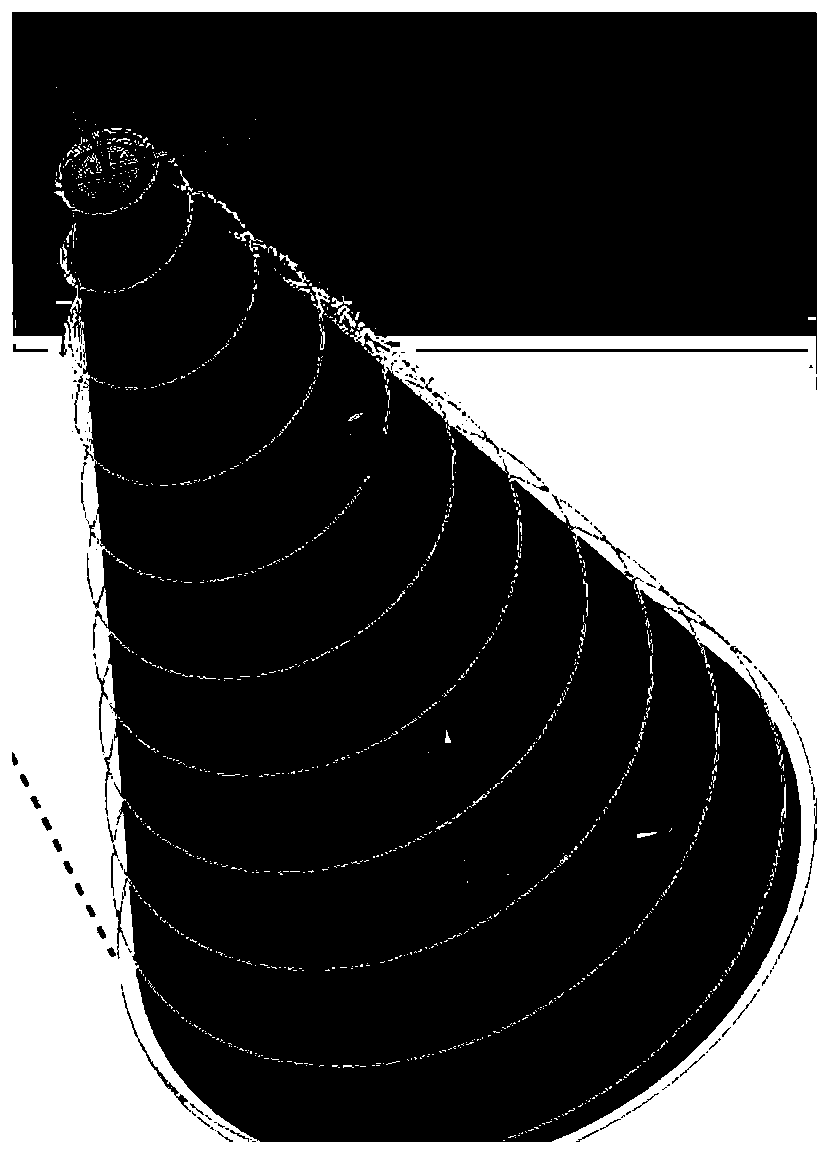
[0029] A parametric programming method for robot constant force grinding processing based on UG NX secondary development of the present invention can effectively parameterize and generate a robot grinding motion track and simulate a robot grinding process.
[0030] Embodiments of the present invention are given below in conjunction with the accompanying drawings, and the technical solutions of the present invention are described in detail and completely. The given embodiments are only some examples and not all embodiments of the present invention. The present invention can be extended to grinding other types of parts, such as steam turbine blades, grinding tools, etc., and parameterizes the automatic grinding trajectory of the robot. Other embodiments obtained by those skilled in the art without creative work all belong to this invention. scope of invention protection.
[0031] The following embodiment takes a specific part as an example to introduce a parametric programming ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More