

Quintic curve path planning method and lane center line maintenance method
A path planning and lane line technology, applied to motor vehicles, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problem of large steering wheel swing, poor cubic curve following performance, and vehicles that cannot follow the preset Tracking and other problems, to achieve the effect of continuous and smooth curvature changes, high real-time performance, and reduced dimensionality and difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
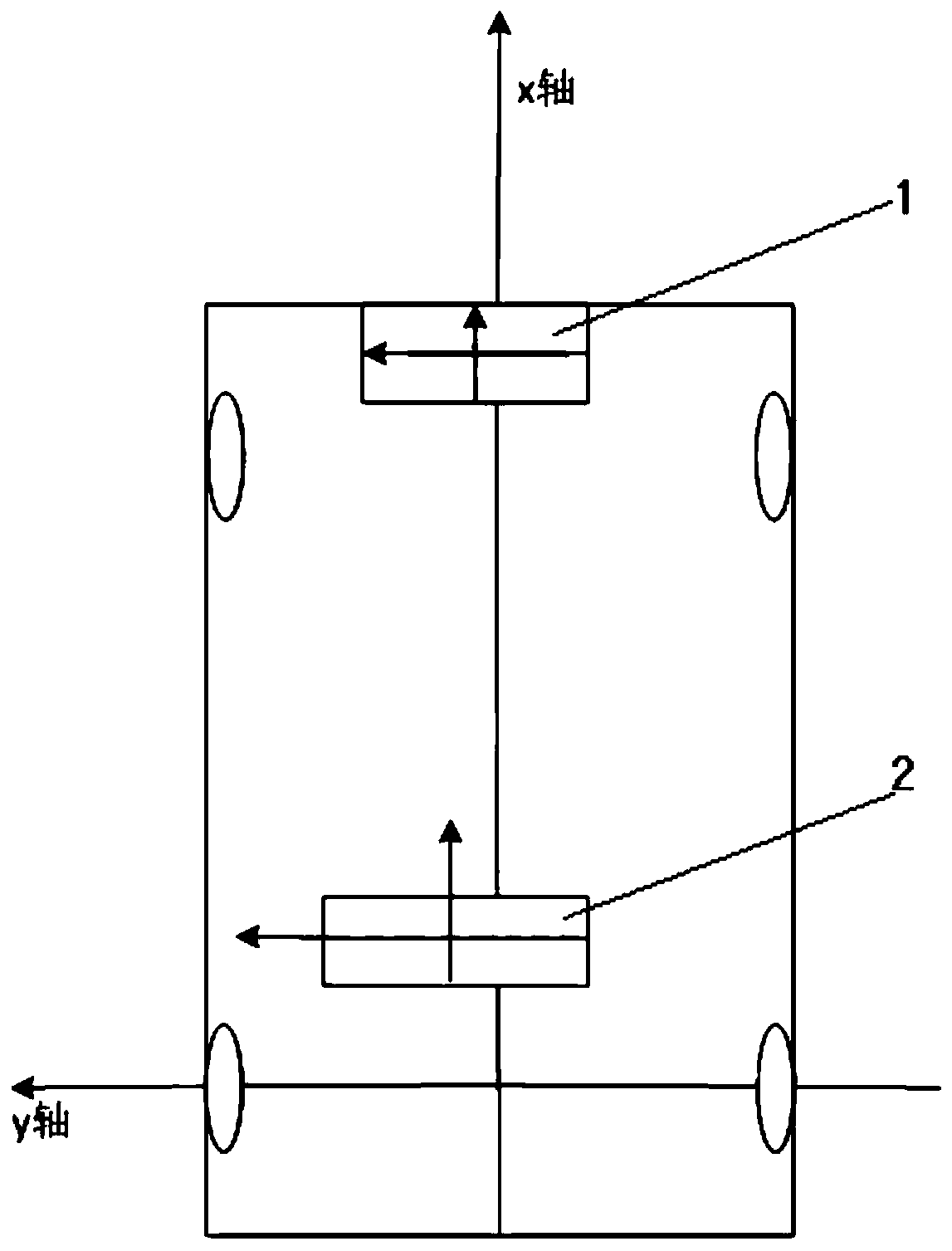
[0033] First, the path planning step is performed, see figure 1 The state models of the starting point S and the ending point T of the vehicle described in this embodiment, as well as the trajectory model path(x) and the lane line model are all represented by the vehicle body coordinate system, and the coordinate origin of the vehicle body coordinate system is at the two rear wheels of the vehicle. The midpoint of the line, the rear wheel connection is the y-axis of the vehicle body coordinate system, looking from the midpoint of the rear wheel connection midpoint to the front wheel connection midpoint, the left is the positive direction of the y-axis of the vehicle body coordinate system, and the y-axis The vertical forward direction is the positive direction of the x-axis of the vehicle body coordinate system, that is, the direction from the midpoint of the rear wheel connection to the midpoint of the front wheel connection; the instantaneous motion characteristics of the veh...
Embodiment 2
[0064] Trajectory planning during automatic driving requires clear lane lines to be realized, and the vehicle body will become unstable when the lane lines are suddenly invisible. This embodiment combines the quintic curve planning method described above to realize the maintenance of the lane centerline. Keep the car body stable when the lane line is suddenly invisible.
[0065] Step 1: Track the feature points of the lane line, calculate the quality of the received lane line as poor quality, and discard the calculated lane line data as poor quality, specifically including the following steps 1.1-1.8.
[0066] Step 1.1. The algorithm runs in a fixed cycle, and the running cycle is H Hz, which means it runs every 1 / H second.
[0067] Step 1.2, in the t-th planning period, the center line of the lane is represented by a cubic curve (y=f t (x)=c 3 x 3 +c 2 x 2 +c 1 x+c 0 ).
[0068] Step 1.3. In the t-th planning cycle, calculate the set of feature points in the local coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More