Redundant robot trajectory planning method
A trajectory planning and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as affecting trajectory tracking accuracy, complicated mathematical modeling process, and slow speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0074] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
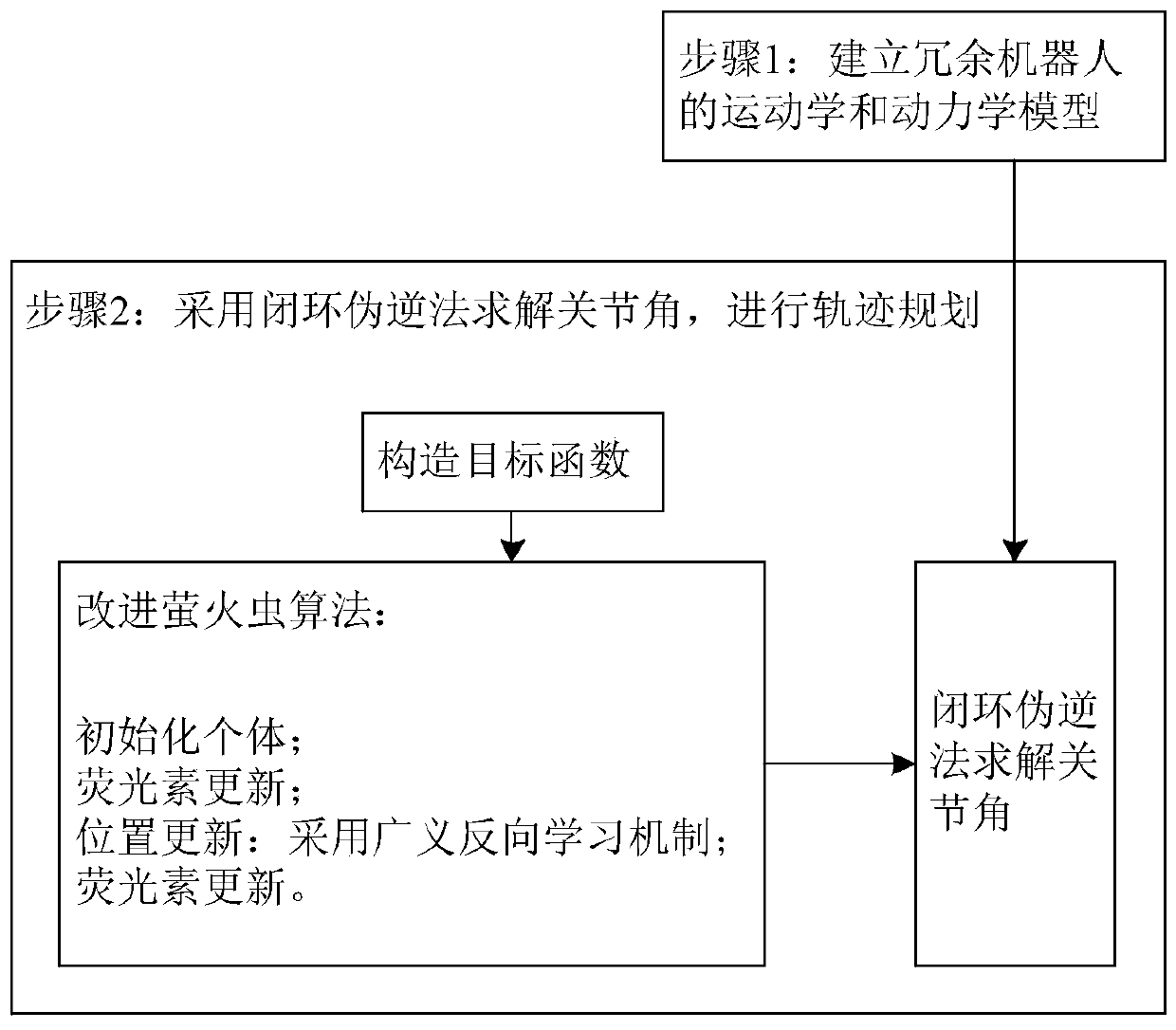
[0075] Please refer to Figure 1 to Figure 8 , the present invention is a redundant robot trajectory planning method, the steps comprising:
[0076] Step 1: Establish the kinematics and dynamics model of the redundant robot, and obtain the mathematical relationship between the joint angular velocity and the pose of the end effector; specifically:
[0077] Step 1.1): Suppose the redundant robot has n degrees of freedom, and its joint angle is q=[q 1 ,q 2 ,...,q n ] T ;The number of variables in the operation space is m, and m1 ,x 2 ,...,x m ] T , then establish the forward kinematics equation of the redundant robot:
[0078] x=f(q) (1)
[0079] In the formula, n is the number of degrees of freedom of the redundant robot, q represen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More