

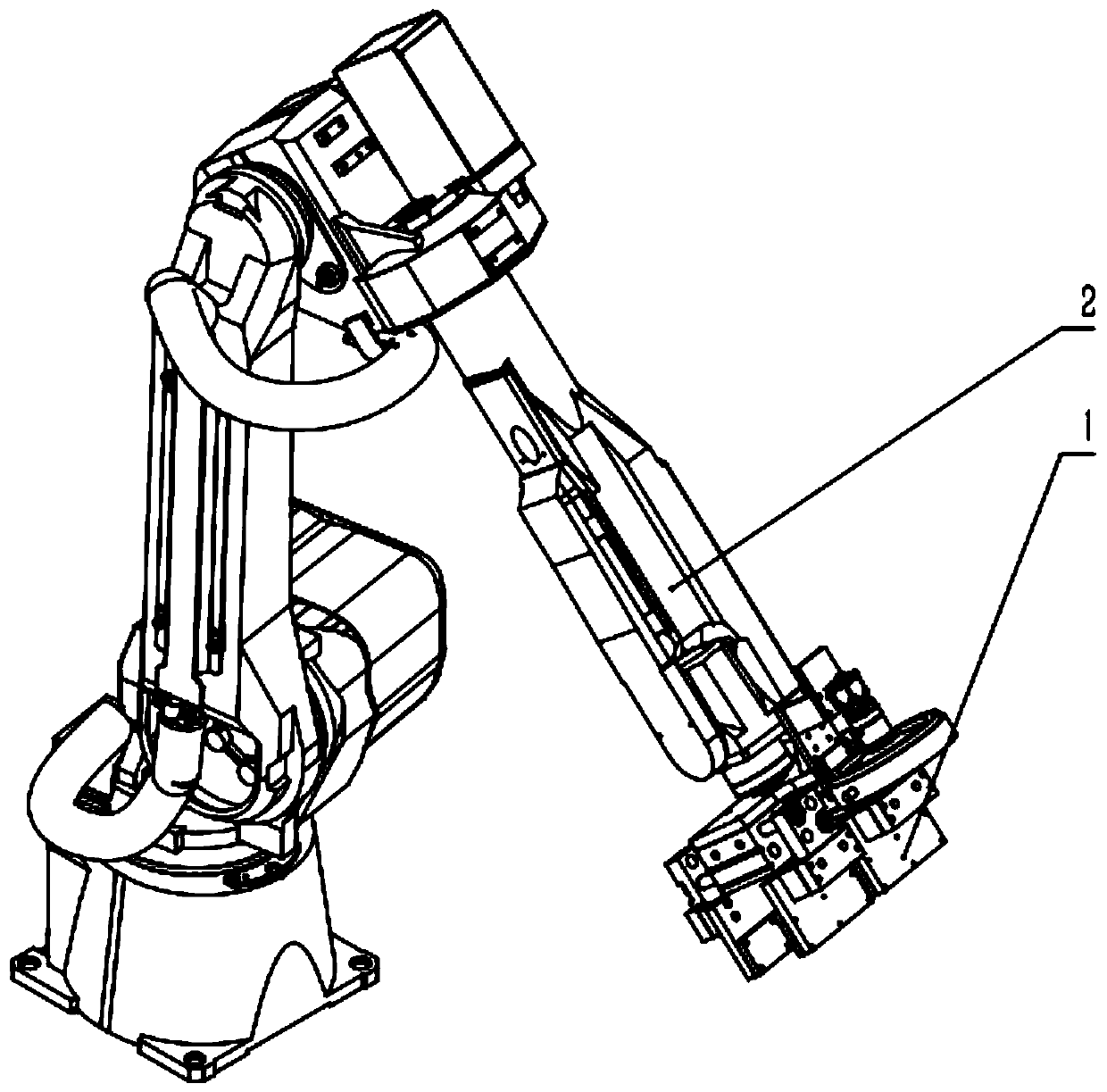
Manipulator fixture and robot
A technology of manipulators and fixtures, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems that the manipulator is difficult to accurately position the product, the manipulator positioning is complicated and troublesome, and the clamping efficiency is difficult to achieve, so as to improve the level of automatic operation, The effect of safe gripping, easy manufacture and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention will be described in detail below. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
[0025] It should be noted that when an element is referred to as being “fixed” or “disposed on” another element, it may be directly on the other element or be indirectly on the other element. When an element is referred to as being "connected to" another element, it can be directly connected to the other element or indirectly connected to the other element. In addition, connection may be for both a fixed function and a circuit / signal communication function.
[0026] It is to be understood that the terms "length", "width", "top", "bottom", "front", "rear", "left", "right", "vertical", "horizontal", "top" , "bottom", "inner", "outer" and other indicated orientations or positional relationships are based on the orientations or positional relationships sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More