

Adjustable permanent magnet adsorption device based on pipe climbing robot
A permanent magnetic adsorption and adjustable technology, which is applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inability to adjust the adsorption force, difficulty in ensuring the flexibility of robot movement, and insufficient effective adsorption force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
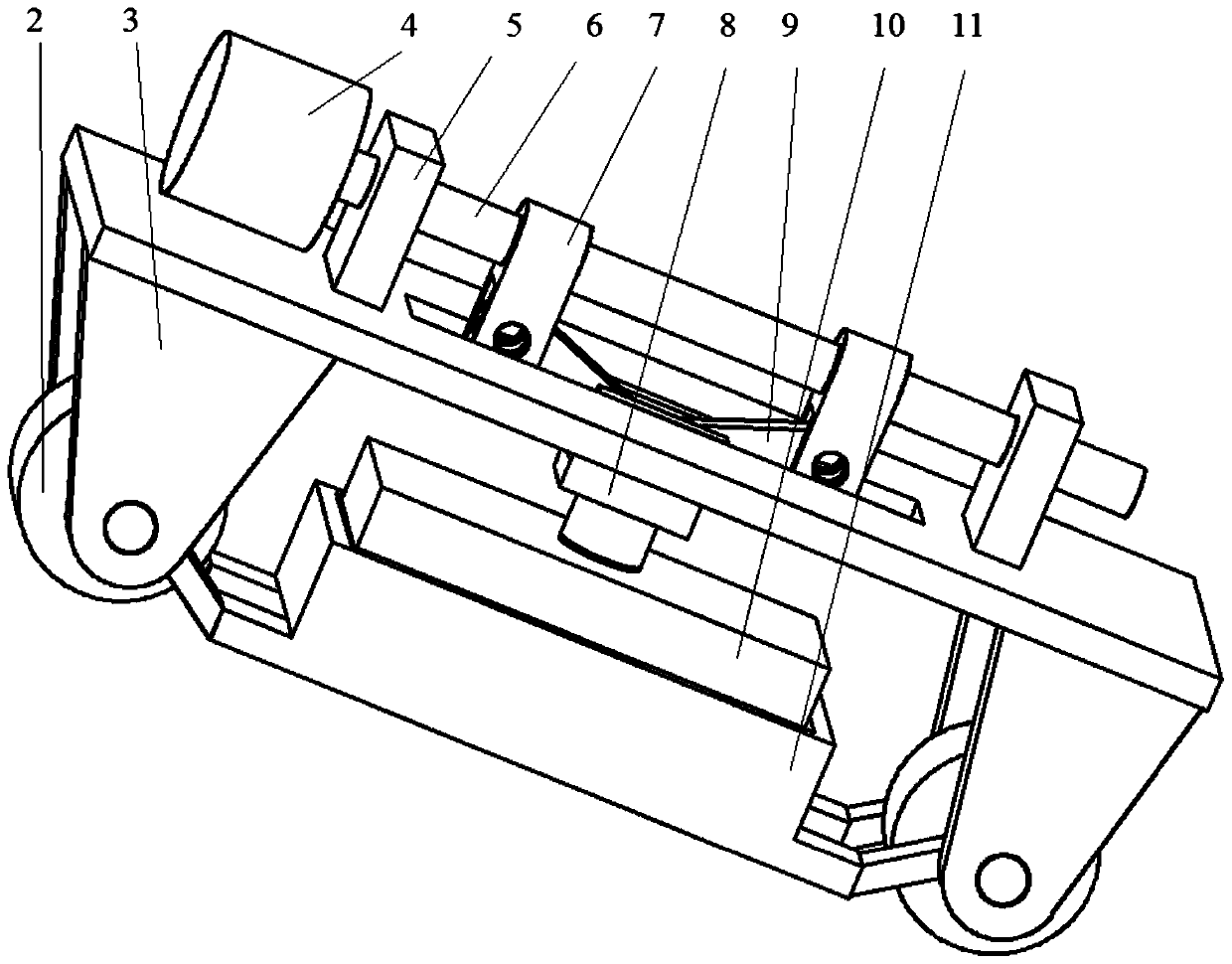
[0025] In an embodiment, an adjustable permanent magnetic adsorption device based on a pipe climbing robot can be applied to specific operations in places such as underwater, such as figure 1 As shown, the adsorption device includes a distance assembly, an adsorption assembly and a lead screw assembly, specifically:
[0026] Described fixed distance component comprises vehicle frame 3, roller 2 and magnetic vehicle plate 11, and roller 2 is arranged on the below of vehicle frame 3, and is positioned at the two ends of magnetic vehicle plate 11, and the roller 2 of magnetic vehicle plate 11 two ends is close to jacket Equal to the tube wall, the magnetic car plate 11 maintains a certain small distance, such as 3mm-5mm, from the jacket wall due to the isolation of the rollers 2, thereby reducing the damage such as scratching of the jacket wall by the device, and ensuring that the magnetic car The permanent magnetic block on the board 11 maintains a sufficiently strong magnetic a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More