

Three-dimensional flight path planning method and device for unmanned aerial vehicle
A trajectory planning and trajectory technology, applied in the direction of energy storage devices, instruments, artificial life, etc., can solve the problem of not being able to simultaneously search for the balance of local optimal values, the difficulty of obtaining the global optimal path, and the search dimension of trajectory planning Issues such as increasing the amount of search data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0123] In order to better illustrate the purpose and advantages of the present invention. The technical solutions provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
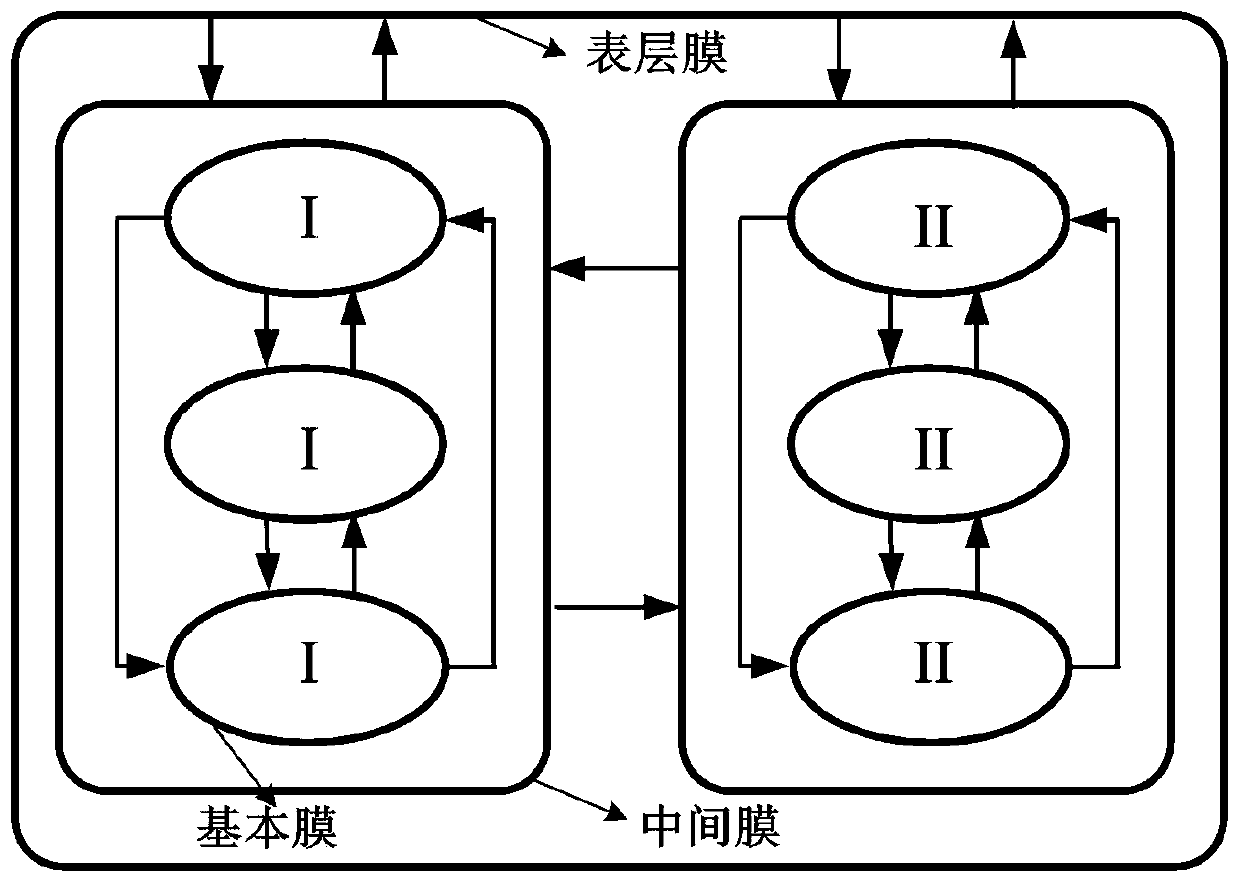
[0124] figure 1 It is a schematic diagram of the cell membrane structure in the present invention, wherein the ellipse is the basic membrane, and the basic membrane represents the trajectory planning algorithm unit in the trajectory planning method of the present invention, and each basic membrane represents a complete and independent trajectory search algorithm program; wherein There are three basic membranes for type I, and multiple basic membranes can also be set. The more basic membranes, the better the search and optimization effect, but the ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More