

Deep diving manned submersible integrated navigation method based on DR/USBL
A manned submersible and integrated navigation technology, applied in the field of high-precision underwater navigation and positioning, can solve problems such as poor fault tolerance, single positioning method, and low data update rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The technical scheme of the present invention will be further described below in conjunction with the drawings.
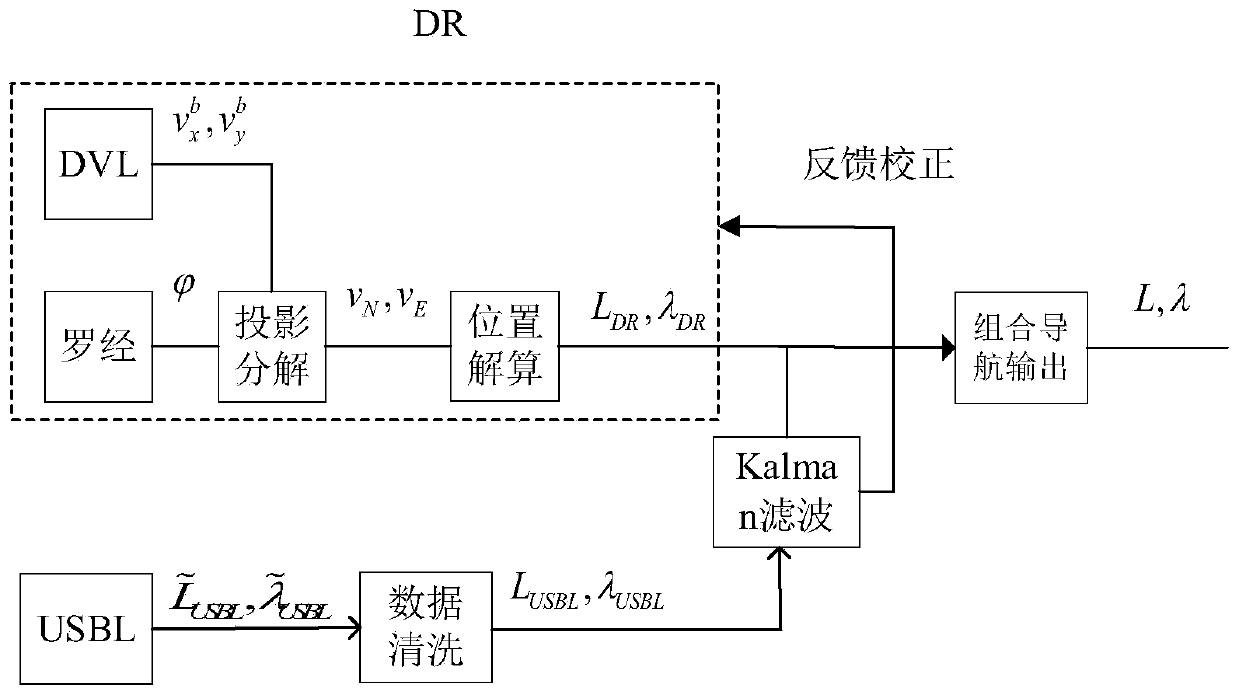
[0068] The present invention proposes an economical and feasible deep submersible manned submersible near seabed integrated navigation scheme without considering the strapdown inertial navigation system (SINS). Use the Doppler log (DVL) and attitude sensor on the manned submersible to form a dead reckoning system (DR); train the support vector machine regression model online by constructing sliding time window samples, and use the trained online support vector machine The (OSVR) model predicts the current ultra-short baseline (USBL) data in real time, and further uses the current USBL data prediction value to perform outlier detection, outlier substitution or missing value supplementation, and realizes real-time preprocessing of USBL data to obtain continuous and consistent positioning Result: Through Kalman filtering technology, the data cleaned USBL and the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More