Robot out-of-order target sorting method based on 3D visual clustering and matching
A robot and clustering technology, applied in the fields of instruments, image analysis, computer parts, etc., can solve the recognition range and accuracy limitations, cannot be well adapted to the multi-change scene and the multi-variety, multi-position production environment, method Line Consistency High Issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
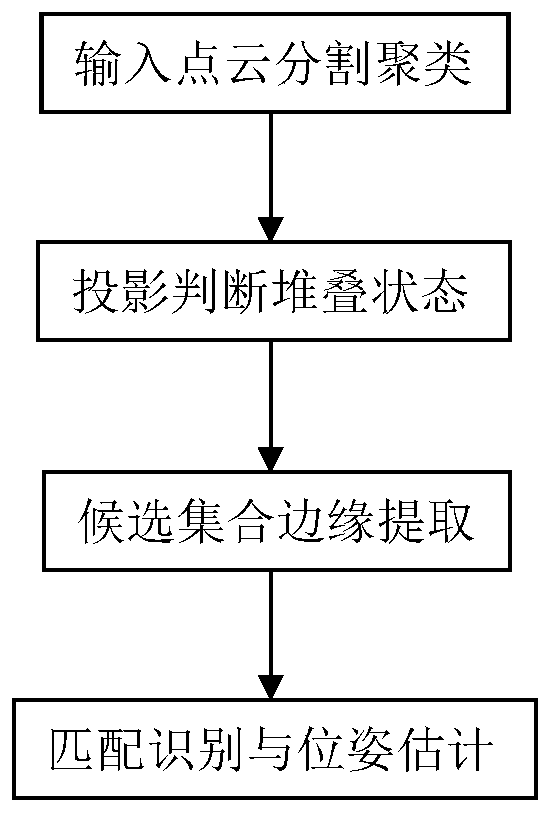
[0108] figure 1 The overall flow chart of the robot out-of-order object sorting method based on 3D visual clustering and matching proposed for this patent. The specific steps of the algorithm are as follows:
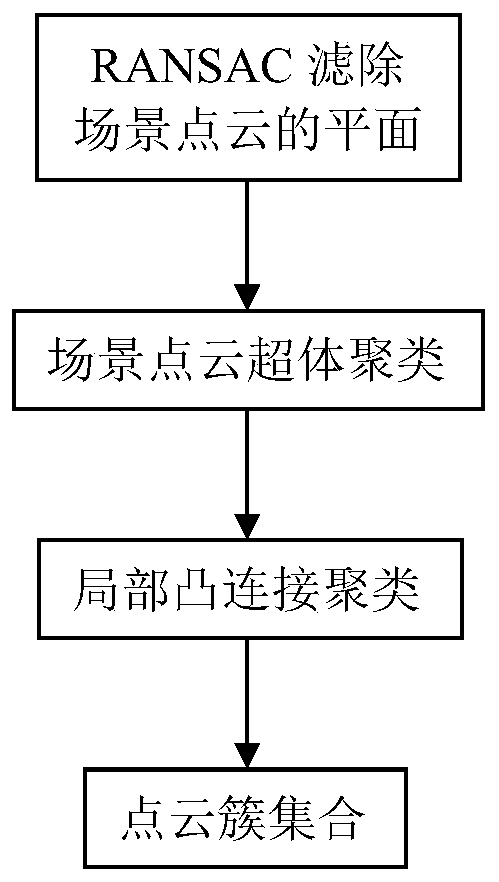
[0109] 1. For the collected sorting scene point cloud, use the random sampling consistent RANSAC algorithm to filter out the sorting scene point cloud plane, and use the super-body clustering and Locally Convex Connected Patches (LCCP) algorithm to stack the sorting scene Segment the point cloud plane to obtain multiple types of sorting scene point cloud clusters;
[0110] Such as figure 2 As shown, this step is divided into three levels: for the collected 3D sorting scene point cloud, first use the random sampling consistent RANSAC algorithm to filter out the plane; , search in the octree of point cloud vo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More