

Role-based group unmanned system cooperative task management method
A role and group technology, applied in the field of group unmanned system control, can solve problems such as lack of flexible and effective support, and achieve the effect of ensuring high efficiency and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
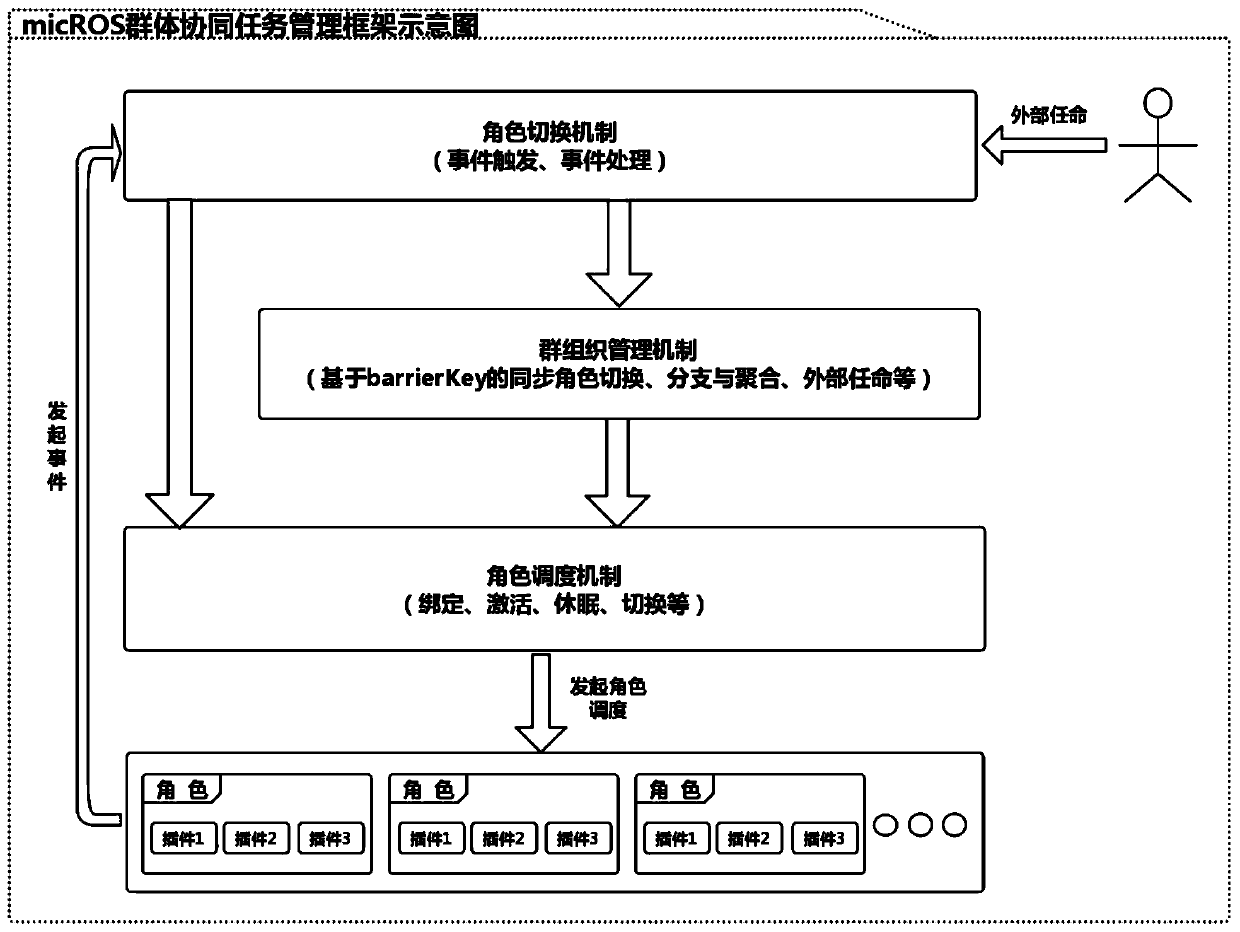
[0048] A role-based collaborative task management method for swarm unmanned systems, such as figure 1 shown, including the following;
[0049] A. Role scheduling mechanism:
[0050]In the swarm intelligent robot operating system, guided by the four scientific issues of "autonomous observation and group perception, autonomous judgment and group cognition, autonomous decision and group game, autonomous action and group dynamics", the "observe ), judgment (orient), decision (decide), action (act)" four links, designed the observation bus, judgment bus, decision bus, action bus, and proposed the concept of role (Actor) to realize the function of the role . "Role" is abstracted as: an execution behavior of a robot to complete a given task, which is the core concept of the swarm intelligent operating system. Applying the concept of role to the control abstraction of swarm unmanned systems, the formed "role" framework has become a swarm The intelligent operating system is the basi...
Embodiment 2
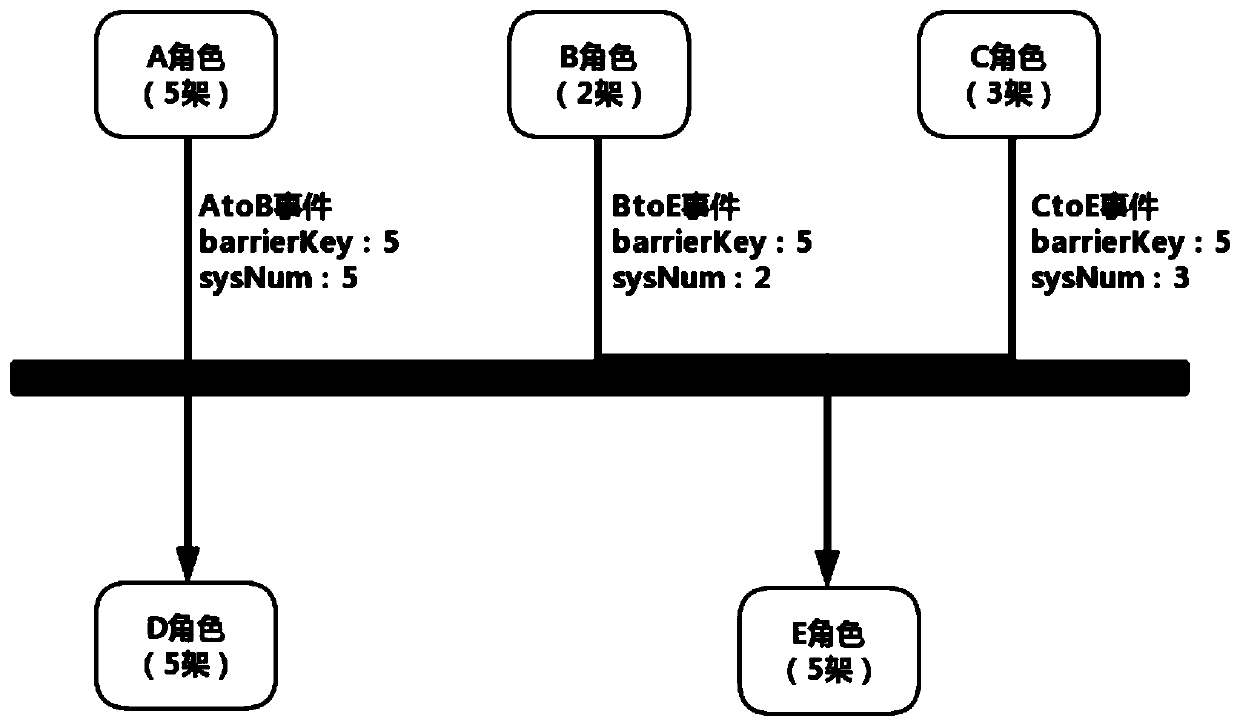
[0070] In order to improve the synchronization of group unmanned systems when performing tasks and enhance task management capabilities, the method described in Embodiment 1 may also include a synchronous role switching mechanism: for synchronous role switching of multiple roles. The synchronous role switching mechanism can realize the function of synchronous switching of multiple unmanned systems in the group from one role to another, and the function of synchronous switching of multiple unmanned systems in the group from different roles to another role. The group roles and the transition conditions and synchronization requirements in the group collaborative task process are strongly constrained, which ensures the efficiency and robustness of the collaborative management of the group unmanned system.
[0071] There are many ways to achieve synchronization, such as mutexes, semaphores, and critical sections. For this example, the synchronous switching of multiple different rol...
Embodiment 3
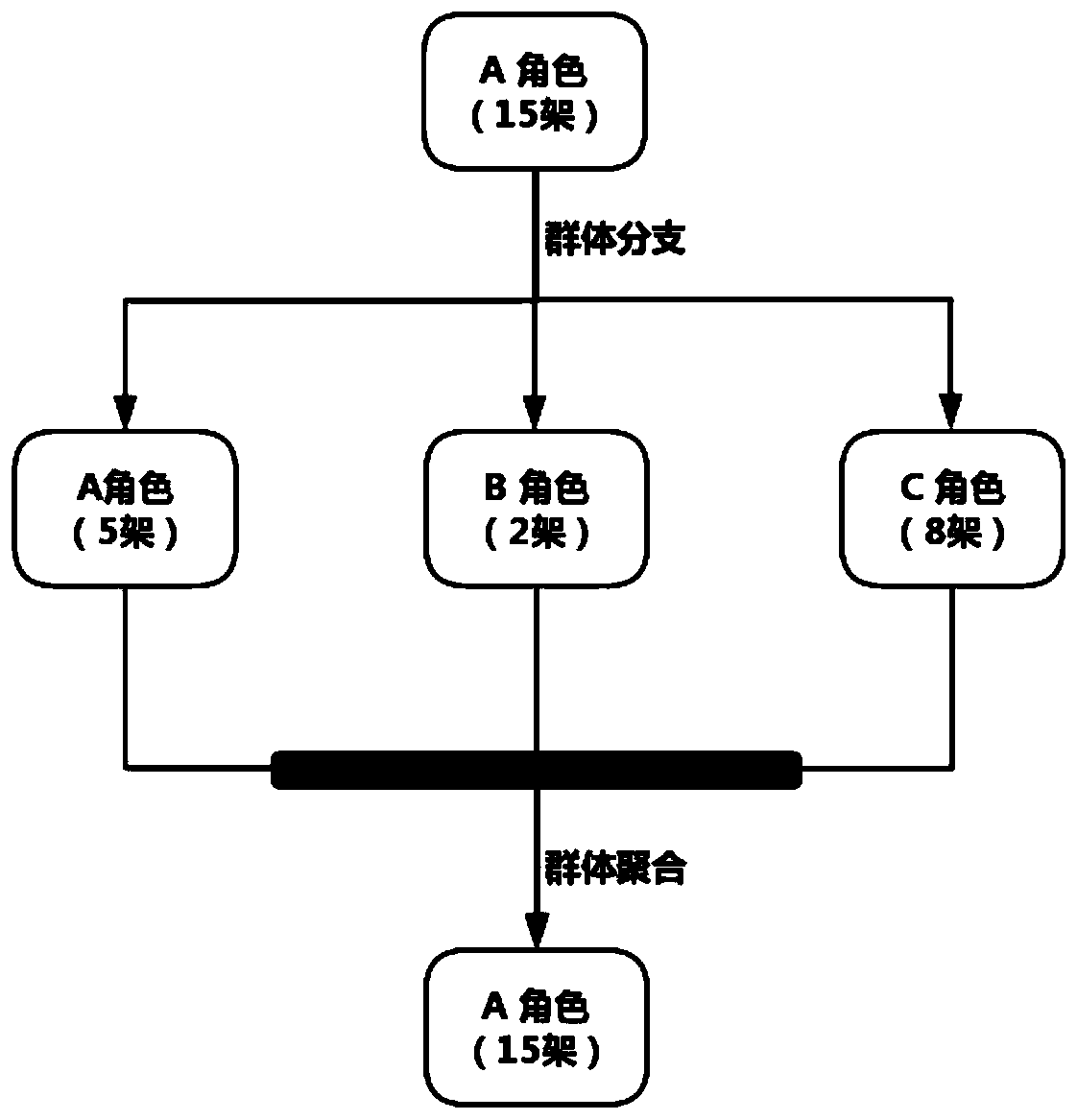
[0074] In order to improve the flexibility of group unmanned system collaborative task management and enhance task management capabilities, the method described in Embodiment 1 also includes a branching and aggregation mechanism: the group used for synchronous task execution splits into multiple sub-groups to perform multiple sub-tasks, and in the sub-groups After the execution of the task, re-aggregate to continue the execution of the task. When the group is branched and split into multiple subgroups, the system will manage the group according to the status of each member in the subgroup to coordinate group tasks.
[0075] Such as image 3 as shown, image 3 It is a schematic diagram of group role branching and aggregation scenarios. Taking the group unmanned system to perform a group collaborative task as an example, 15 UAVs play the role of A and form a formation to fly. When the target is found, the corresponding event is triggered and the event is processed, and the syn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More