Intelligent driving vehicle transverse control method and control system
A lateral control and intelligent driving technology, applied in the direction of control devices, etc., can solve the problems of difficulty in mass production, large installation space for lateral control systems, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
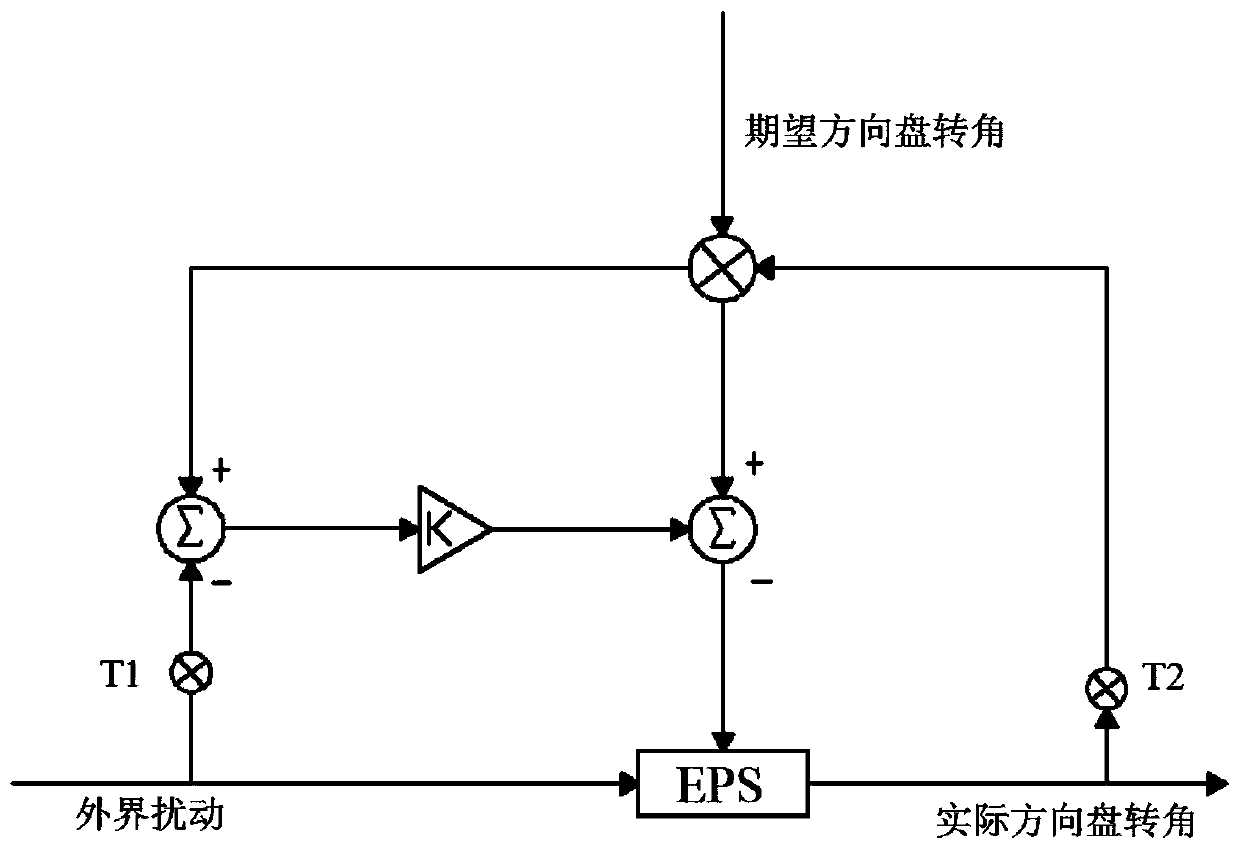
[0074] refer to figure 1 As shown, the first embodiment of a drivable vehicle lateral control method provided by the present invention includes the following steps:
[0075] S1, according to the vehicle power steering characteristics, establish a torque calibration simulation model of the feedforward control system;
[0076] The vehicle power steering characteristic is the relationship among speed, steering wheel angle and steering wheel power torque obtained by calibrating different steering wheel angles under preset speed conditions;
[0077] S2. Establish a torque calibration simulation model of the feedback control system according to the characteristics of the vehicle power steering;
[0078] S3, by setting the expected working conditions, adjust the parameters of the torque calibration simulation model of the feedforward control system and the torque calibration simulation model of the feedback control system according to the parameter adjustment rules;
[0079] S4, ve...
no. 2 example
[0083] A second embodiment of a drivable vehicle lateral control method provided by the present invention includes the following steps:
[0084] S1, according to the vehicle power steering characteristics, establish a torque calibration simulation model of the feedforward control system;
[0085] The vehicle power steering characteristic is the relationship among speed, steering wheel angle and steering wheel power torque obtained by calibrating different steering wheel angles under preset speed conditions;
[0086]
[0087]
[0088] Among them, z 1 ,z 2 ,z 3 are different state observers; l 1 , l 2 , l 3 is the observer gain coefficient; θ is the desired steering wheel angle; J m is the equivalent moment of inertia of the steering system; M r is the steering wheel torque, δ is the set threshold, and ε is the transmission ratio of the steering system.
[0089] S2. Establish a torque calibration simulation model of the feedback control system according to the char...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com