

Triaxial apparatus for synchronously loading high-frequency cyclic load under static load
A triaxial instrument and high-frequency technology, applied in the field of triaxial instrument, can solve the problems of low vibration frequency, unstable stress, low vibration frequency, etc., and achieve the effect of good durability, fast response speed and long expected service life of the equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention.
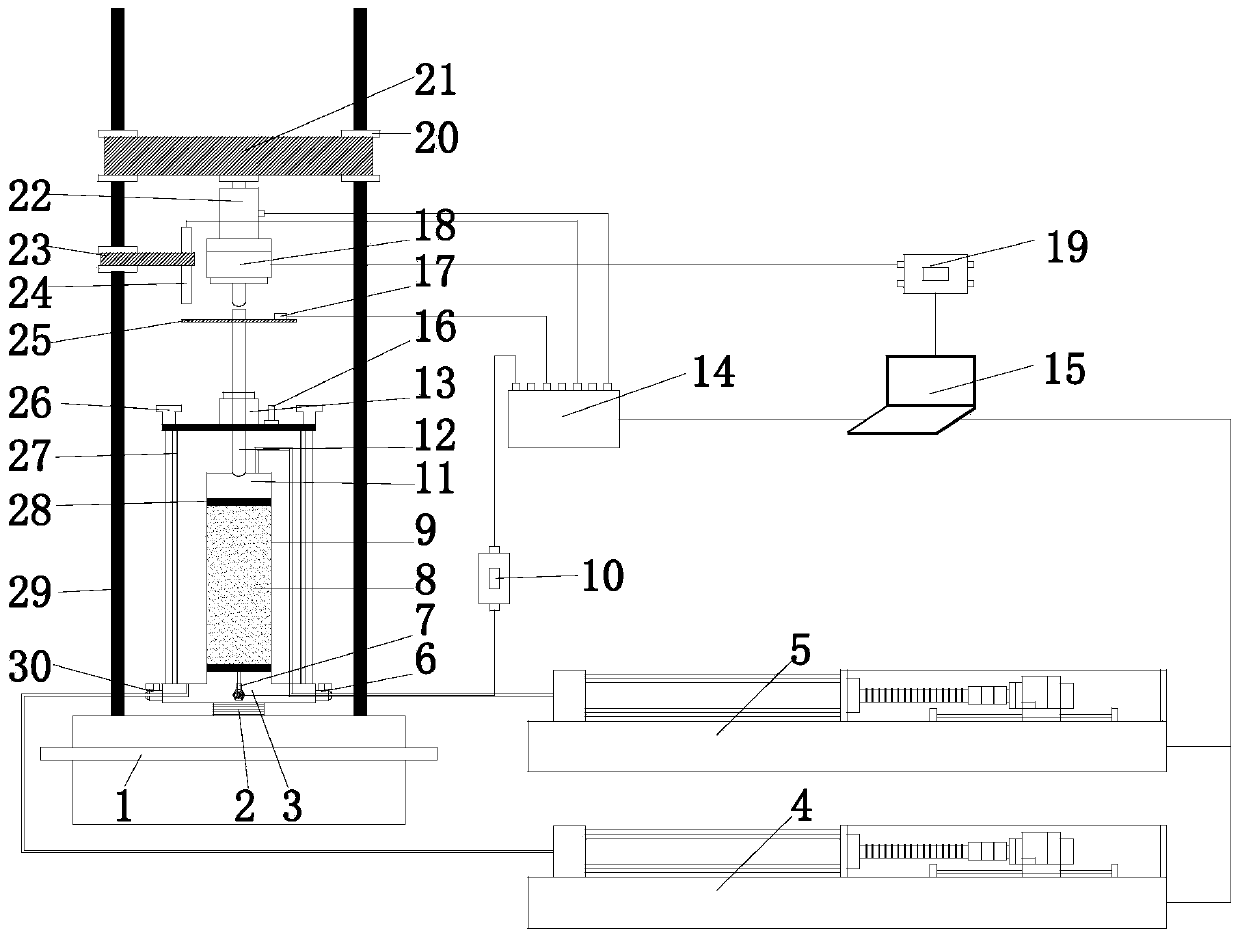
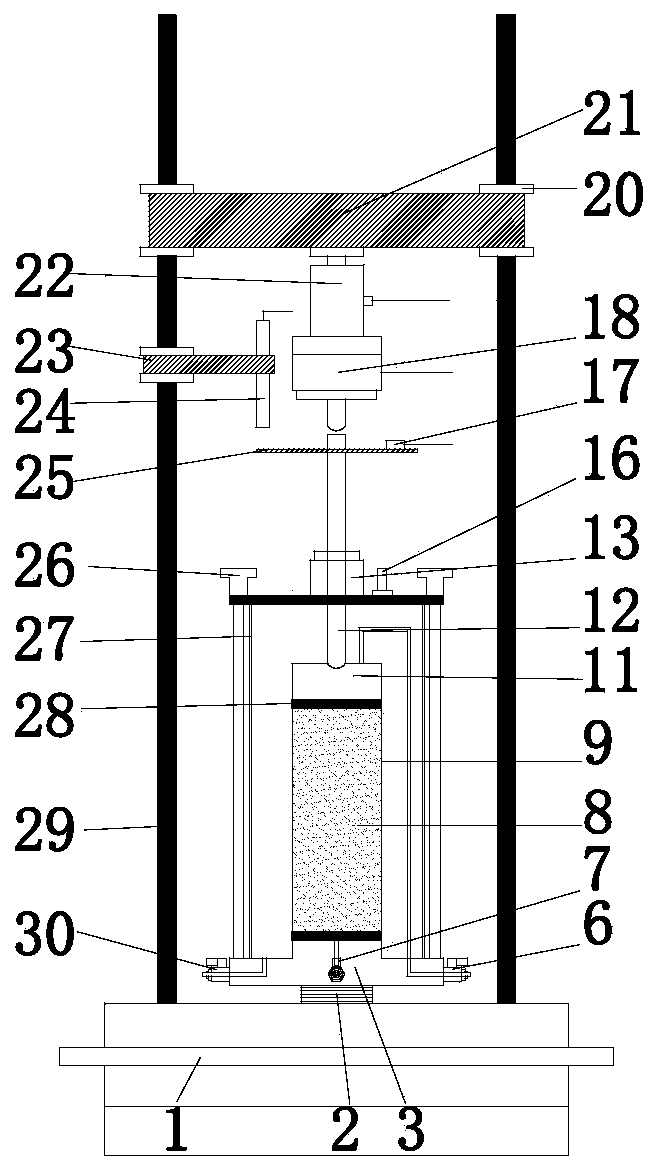
[0030] The present invention provides a triaxial instrument for synchronous loading of high-frequency cyclic load under static load. Compared with the traditional instrument, the load frequency range of the triaxial instrument is 0-120Hz, which is much higher than the 20Hz frequency of the existing instrument, including The following structure:
[0031] 1) Main structure, 2) Loading system, 3) Pore pressure measurement system, 4) Acceleration measurement system, 5) Axial stress measurement system, 6) Displacement measurement system
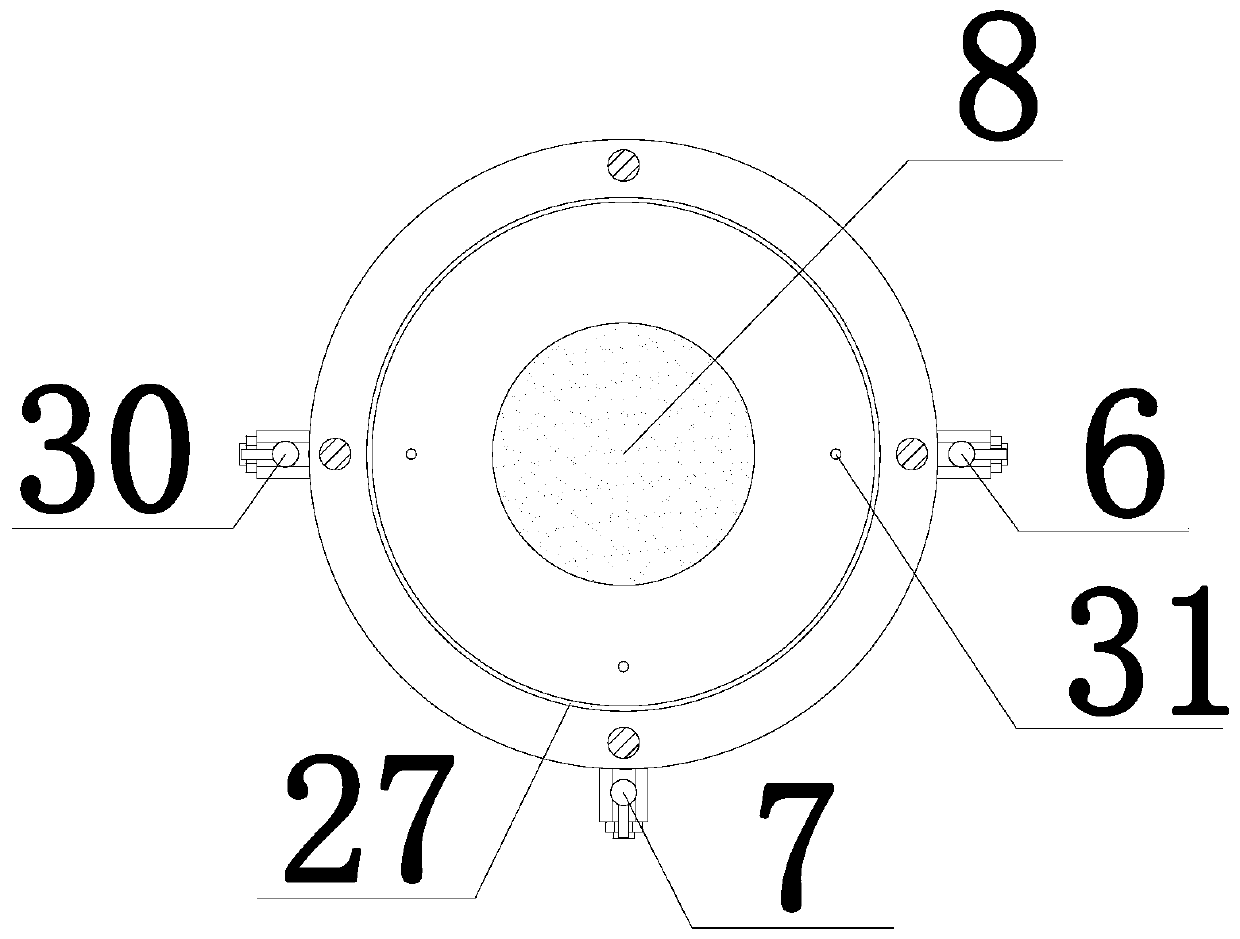
[0032] Such as figure 1 As shown, the main structure of the triaxial instrument includes a reaction force frame 21, a loading rod 12, a pressure chamber 27, a sample 8 wrapped in latex film, a pressure chamber base 3, a triaxial instrument base 1, and a The counterforce stand pole 29 of the reactio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More