

Visual SLAM front-end pose estimation method based on deep learning
A deep learning and vision technology, applied in the field of visual navigation, can solve problems such as poor universality, difficult feature detection, and poor robustness, and achieve strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
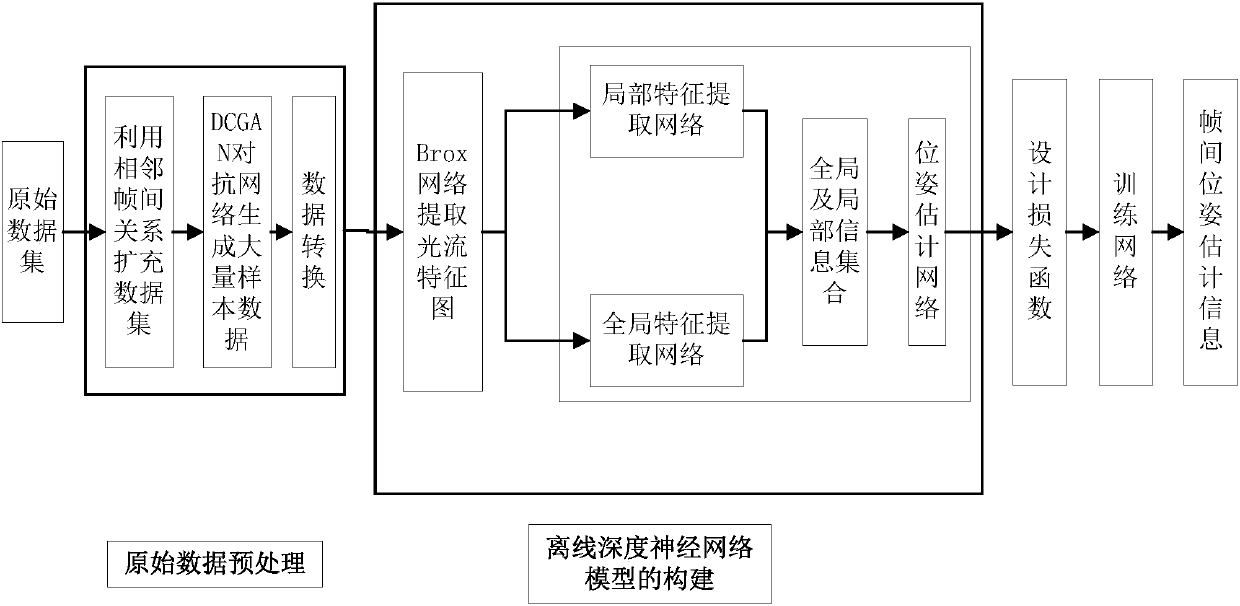
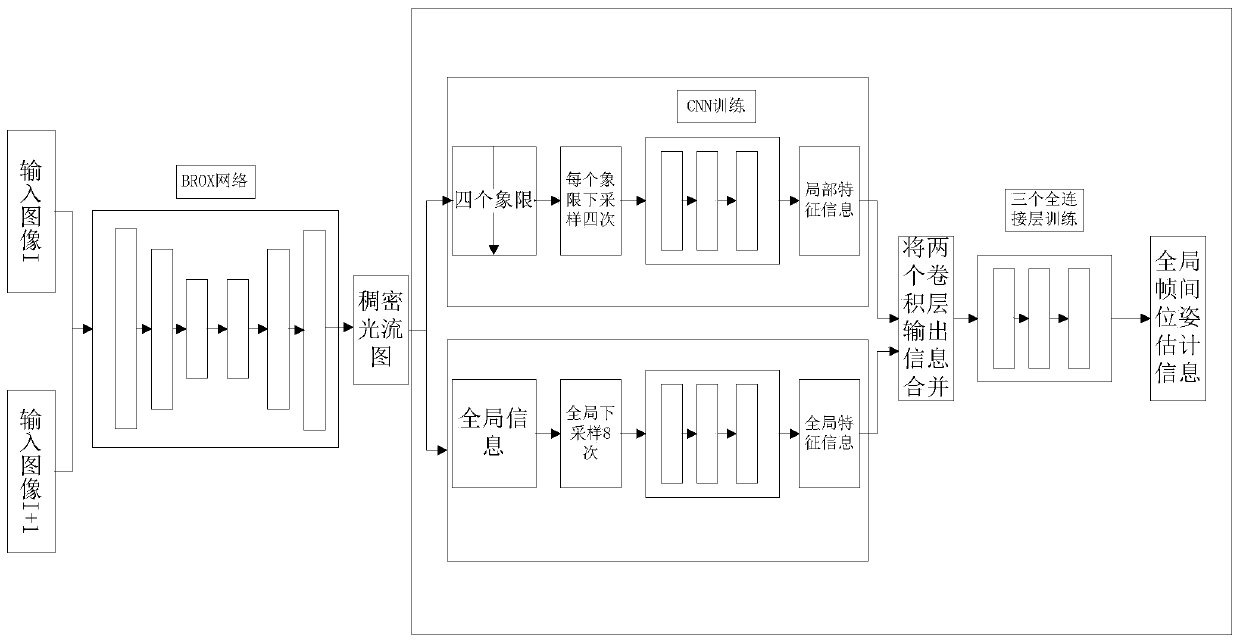
[0052] After receiving continuous image frame input in an end-to-end manner, the pose transformation between frames is estimated in real time. First, data preprocessing is performed on the original data set, including data expansion and data conversion, and then the Brox network is constructed to extract dense optical flow from the input continuous frame images; the extracted optical flow map is divided into two networks for feature extraction, One branch uses global information to extract high-dimensional features, and the other branch divides the optical flow map into 4 sub-images, which are respectively down-sampled to obtain image features; and finally, the features obtained by the training of the two branches are fused. In the last cascaded fully connected network, pose estimation is performed to obtain the pose between two adjacent frames. The ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More