

Unmanned transport vehicle operation scheduling system and method
A transport vehicle and unmanned driving technology, which is applied in the dispatching operation of unmanned transport vehicles and the dispatching operation system of unmanned transport vehicles. Effect of labor cost and manpower input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
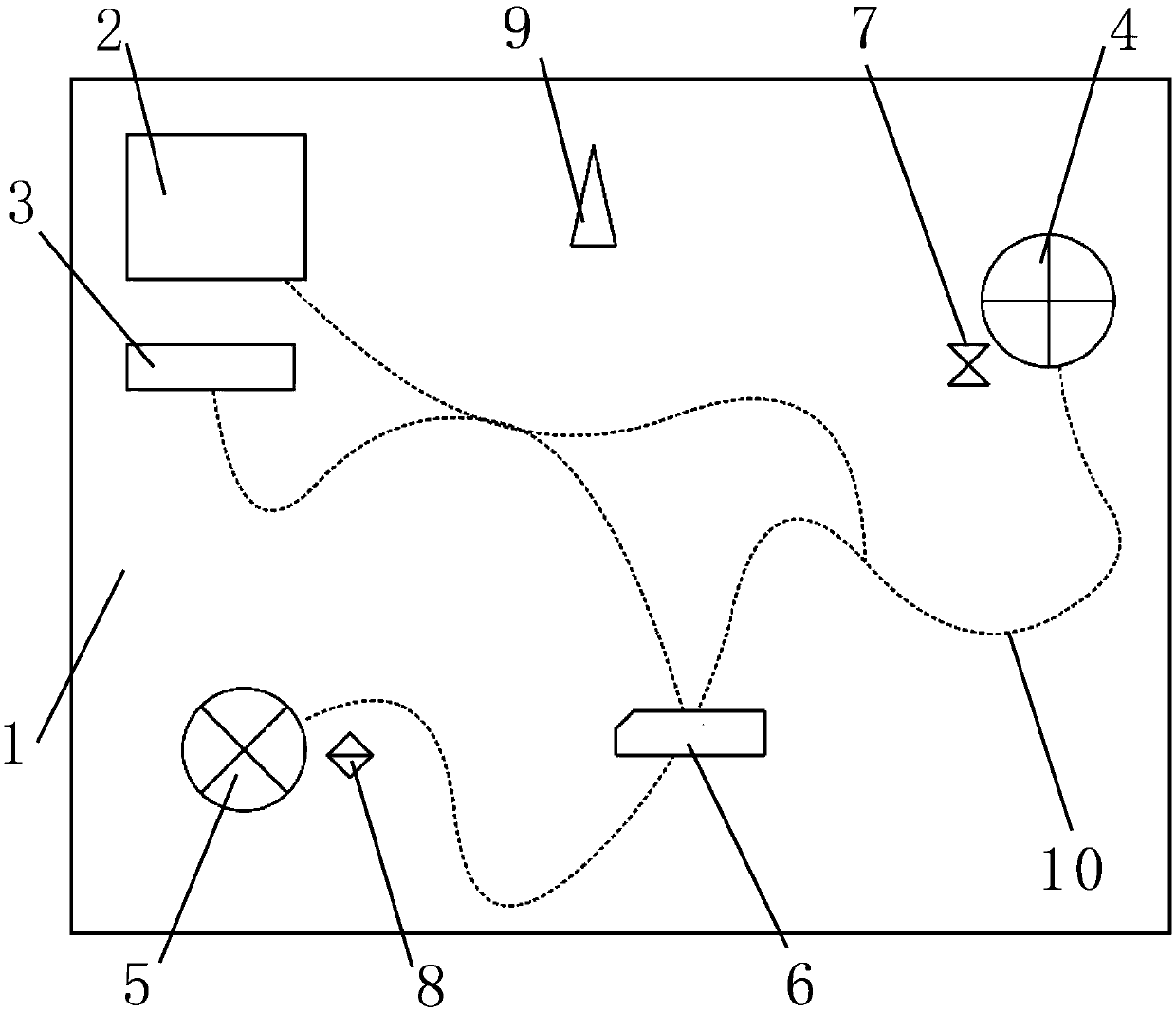
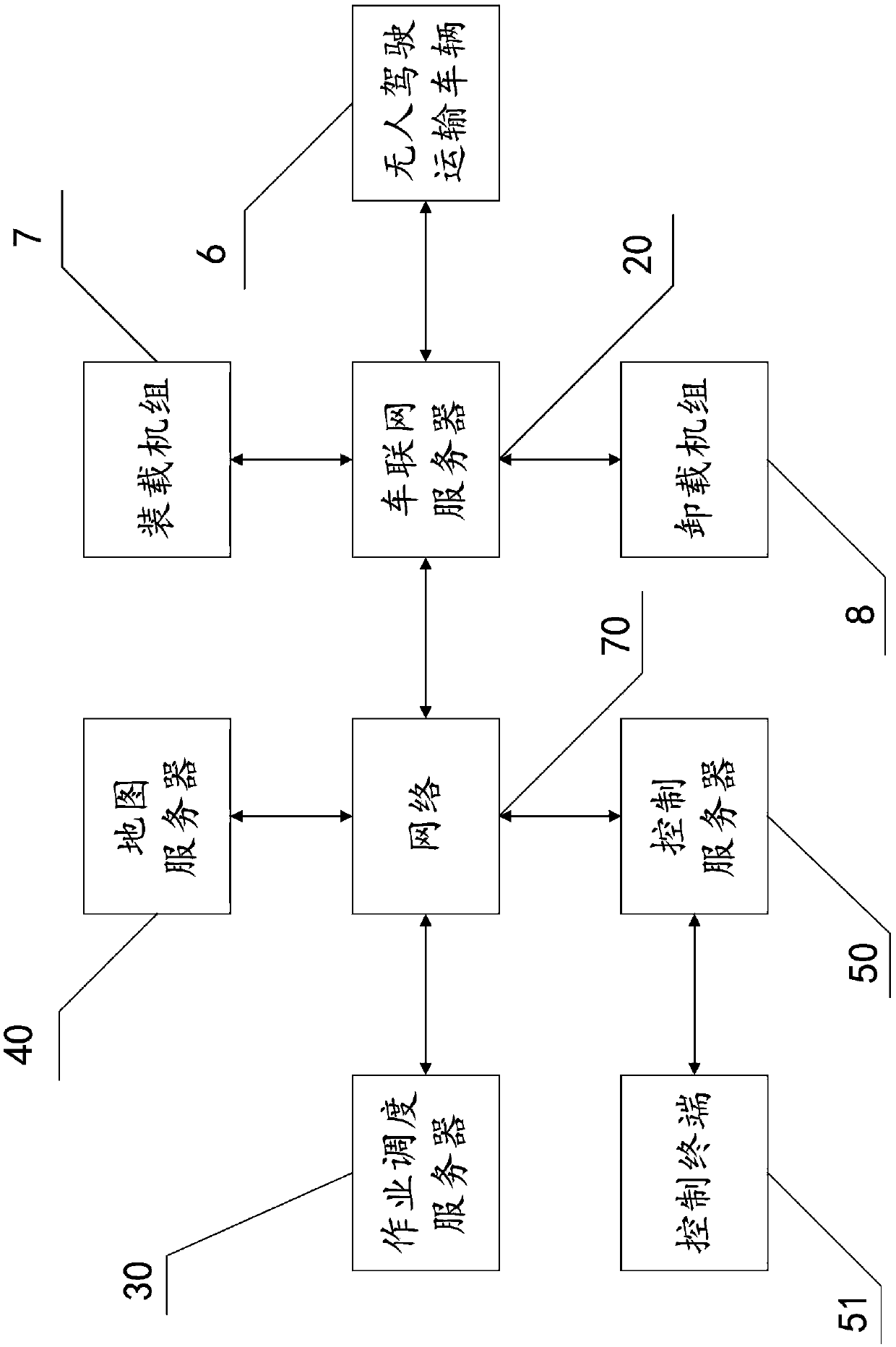
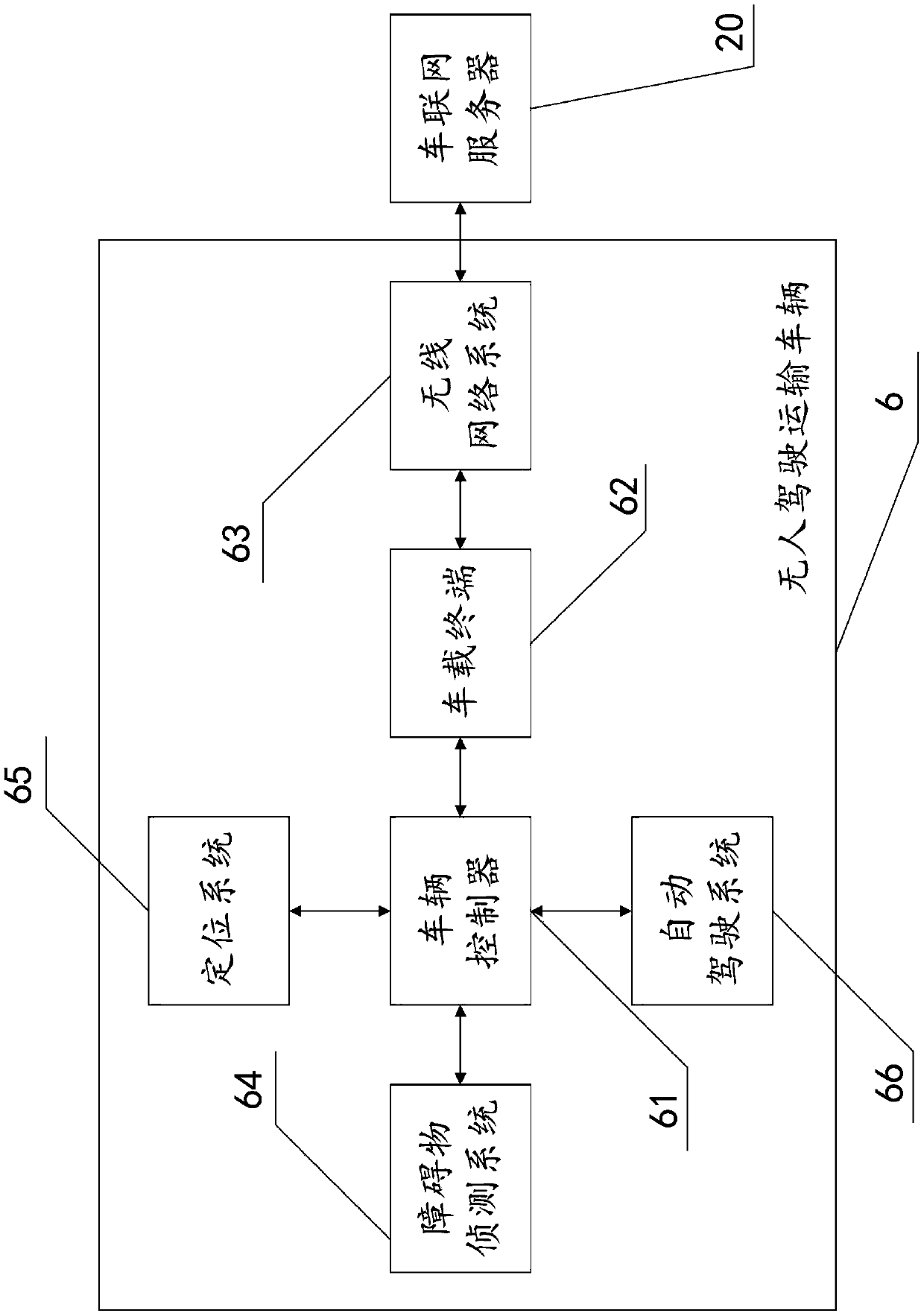
[0053] Such as figure 1 As shown, it is a schematic diagram of the application site of the unmanned transport vehicle in Embodiment 1 of the present invention; as figure 2 As shown, it is a schematic structural diagram of the unmanned transport vehicle operation dispatching system in Embodiment 1 of the present invention; as image 3 Shown is a schematic diagram of a part of the internal structure of the unmanned transport vehicle in Embodiment 1 of the present invention.
[0054] Embodiment 1 of the present invention provides an unmanned transport vehicle job scheduling system, which includes at least one unmanned transport vehicle 6, at least one loading unit 7, at least one unloading unit 8, a car networking server 20, and a job scheduling server 30 and control server 50;
[0055] The Internet of Vehicles server 20, the job scheduling server 30 and the control server 50 are connected to each other through the network 70;
[0056] The Internet of Vehicles server 20 is al...
Embodiment 2
[0097] The difference between this embodiment and embodiment 1 is:
[0098] Such as Figure 4 As shown, it is a flow chart of the operation scheduling method for unmanned transport vehicles in Embodiment 2 of the present invention; as Figure 5 As shown, it is a flow chart of scheduling instruction execution in Embodiment 2 of the present invention. This embodiment provides a method for dispatching unmanned transport vehicles, which includes the following steps:
[0099] Step S1, the user loads or enters multi-dimensional scheduling activation information on the control terminal 51, and starts the task;
[0100] Step S2, after the control server 50 receives the start task request, it correlates and verifies the multi-dimensional scheduling activation information, and after verification, continues to transmit the information to the job scheduling server 30, and starts the scheduling;
[0101] Step S3, the job scheduling server 30 starts to detect the status of the unmanned t...
Embodiment 3
[0117] The difference between this embodiment and embodiment 1 is:
[0118] The unmanned transport vehicle operation scheduling system in Embodiment 1 is applied to road transport vehicles such as the unmanned transport vehicle 6. Similarly, the operation scheduling system is suitable for unmanned water surface vehicles. The operation scheduling system applies The scene is also suitable for the water transportation scene.
[0119] Change vehicles to boats, and site 1 is changed from a land-based site to a water surface area.
[0120] Preferably, the obstacle detection system 64 includes an electromagnetic wave detection device and / or an acoustic wave detection device, and the electromagnetic wave detection device is preferably a camera detector and a radar detector. The acoustic detection device is preferably a sonar detector.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More