Final welding station workpiece clamping manipulator for automatic ultrasonic welding
A technology of ultrasonic welding and workpiece clamping, applied in welding equipment, manufacturing tools, non-electric welding equipment, etc., can solve the problems of reliability, simplicity, flexibility, volume, small size, easy maintenance, and strictness, so as to ensure the working position The effect of work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to understand the technical essence and beneficial effects of the present invention more clearly, the applicant will describe in detail the following examples, but the descriptions of the examples are not intended to limit the solutions of the present invention. Equivalent transformations that are only formal but not substantive should be regarded as the scope of the technical solution of the present invention.
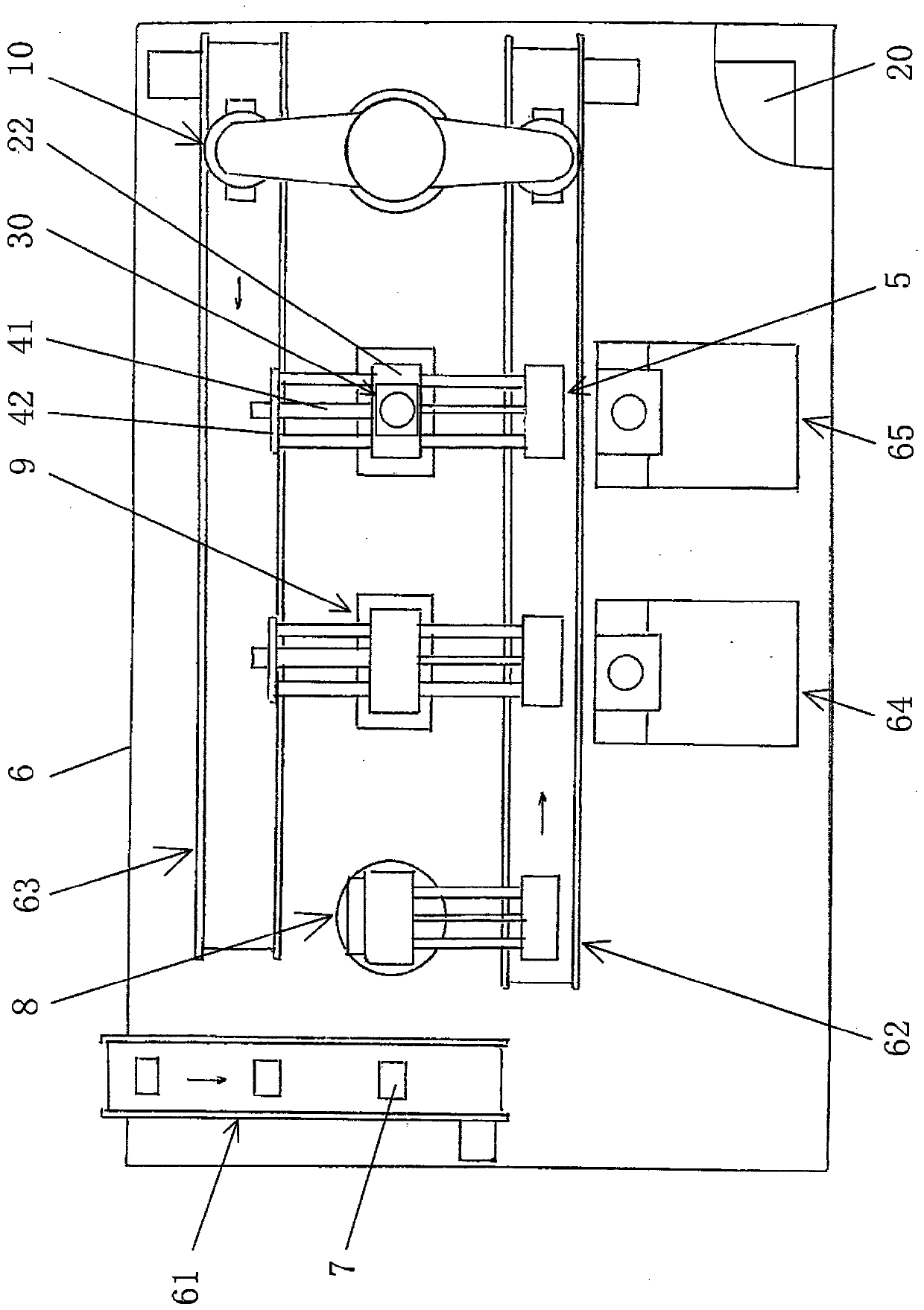
[0021] face below figure 1 and figure 2 In the description, all the concepts related to the directionality or directionality of up, down, left, right, front and back are based on figure 1 The position state is referenced, while the image 3 is described as image 3 The location status is taken as an example, so it cannot be understood as a special limitation on the technical solution provided by the present invention.
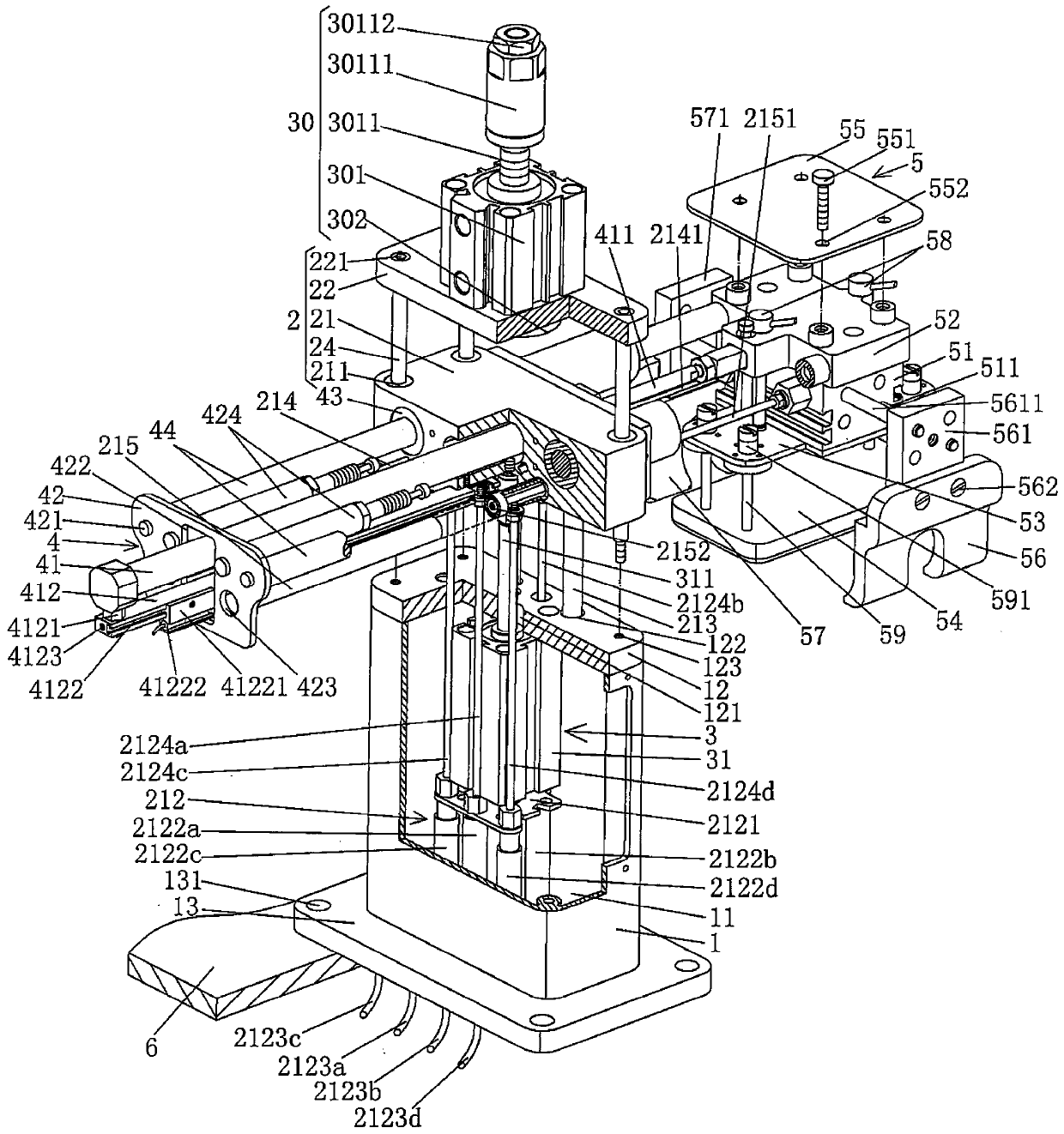
[0022] See figure 1 , shows the base 1, the base 1 is set on the workbench 6 in the use state; shows a lifting platform mechanis...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap