

Crawling welding robot control method, robot and storage medium
A technology of welding robot and control method, which is applied in the field of measurement and control, and can solve problems such as difficult to reflect the change of arc length in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
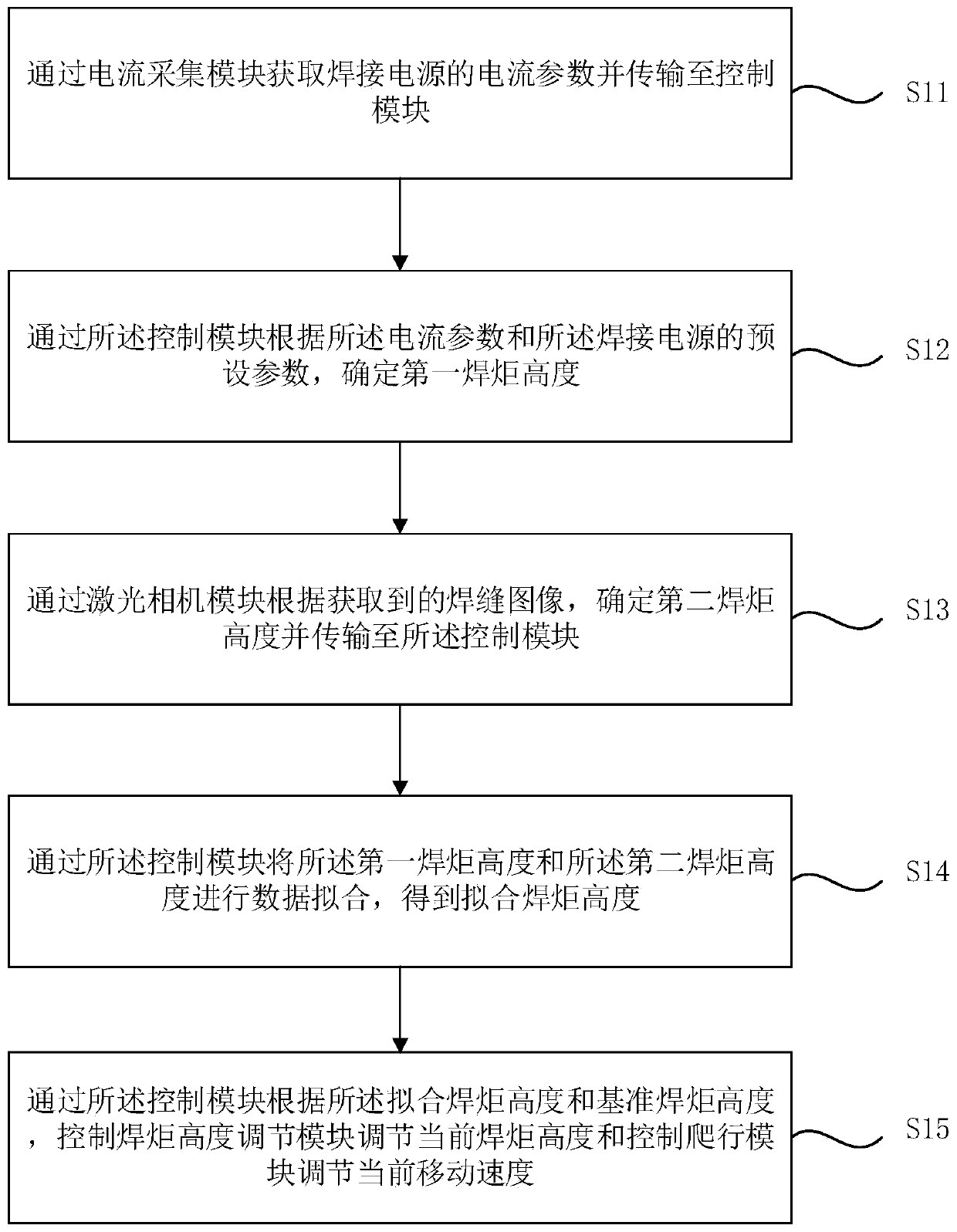
[0024] figure 1 It is a flow chart of the control method of the crawling welding robot provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of using a welding torch for automatic welding. This method can be executed by the control device of the crawling welding robot provided by the embodiment of the present invention. This device can be implemented by hardware and / or software, and generally can be integrated in crawling welding robots. Such as figure 1 As shown, it specifically includes the following steps:
[0025] S11. Obtain the current parameters of the welding power source through the current acquisition module and transmit them to the control module.
[0026] The current acquisition module can be located in the welding power source. The welding power source provides real-time feedback of current and voltage parameters during welding while providing welding energy. Among them, the current parameters change significantly dur...
Embodiment 2
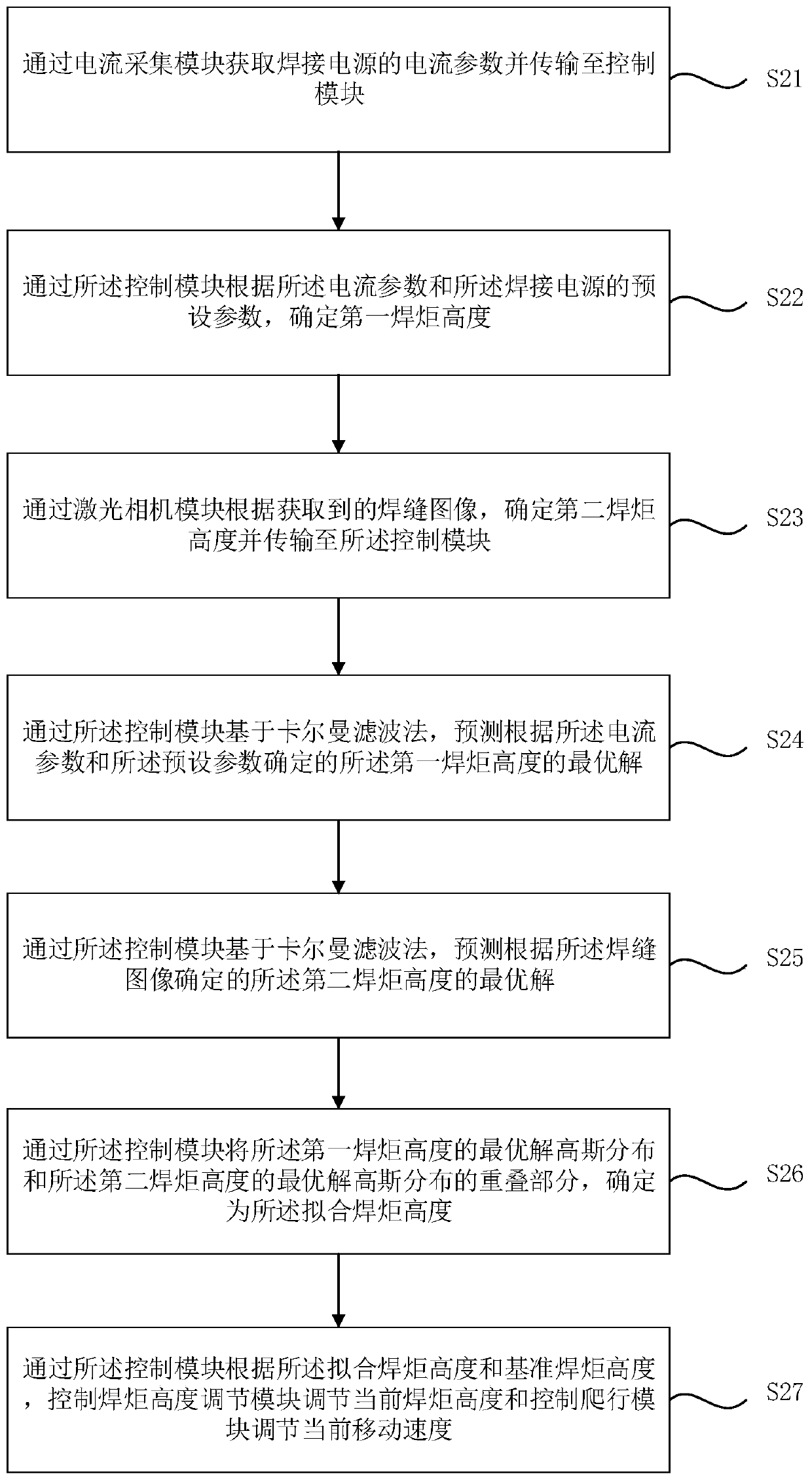
[0045] figure 2 It is a flow chart of the control method of the crawling welding robot provided by Embodiment 2 of the present invention. The technical solution of this embodiment is further refined on the basis of the above-mentioned technical solution. Optionally, the method used for data fitting of the first welding torch height and the second welding torch height is the Kalman filter method, and the The optimal solution and the characteristics of the Gaussian distribution determine the fitting torch height. Correspondingly, such as figure 2 As shown, it specifically includes the following steps:
[0046] S21. Obtain the current parameters of the welding power source through the current acquisition module and transmit them to the control module.
[0047] S22. Using the control module to determine a first welding torch height according to the current parameters and the preset parameters of the welding power source.
[0048] S23. Using the laser camera module to determi...
Embodiment 3
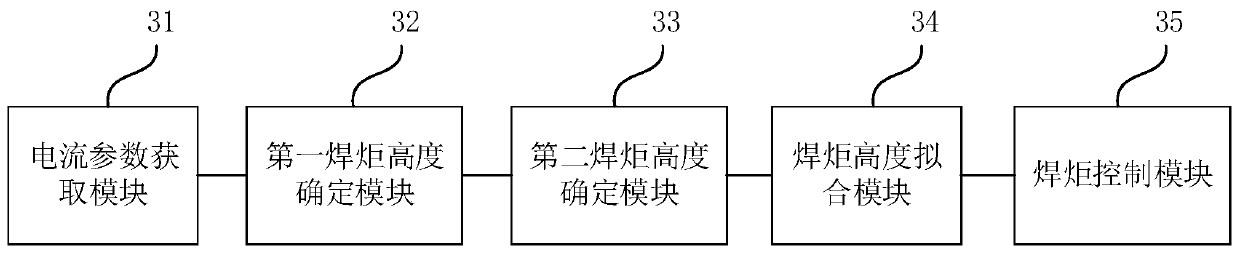
[0059] image 3 It is a schematic structural diagram of a control device for a crawling welding robot provided in Embodiment 3 of the present invention. The device can be realized by hardware and / or software, and can be integrated into a crawling welding robot. Such as image 3 As shown, the device includes:
[0060] The current parameter acquisition module 31 is used to acquire the current parameters of the welding power source through the current acquisition module and transmit them to the control module;
[0061] The first welding torch height determination module 32 is used to determine the first welding torch height through the control module according to the current parameters and the preset parameters of the welding power supply;
[0062] The second welding torch height determination module 33 is used to determine the second welding torch height and transmit it to the control module according to the acquired welding seam image through the laser camera module;
[0063...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More