

Object six-degree-of-freedom pose estimation method based on color and depth information fusion
A depth information, pose estimation technology, applied in the field of robot vision, can solve the problems of reducing algorithm efficiency, template matching time increase, time-consuming, etc., to achieve accurate pose estimation, good expressive ability, and improved robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
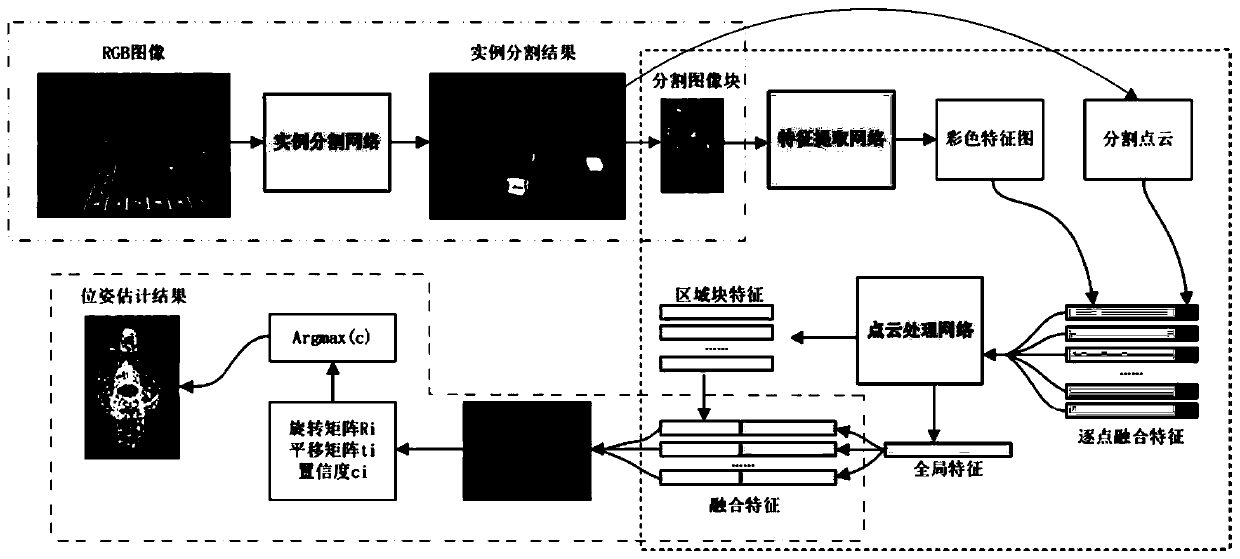
[0035] This embodiment provides a six-degree-of-freedom pose estimation method for objects based on fusion of color and depth information. The schematic diagram of the method is shown in figure 1 As shown, it specifically includes the following steps:
[0036] S1. Obtain the color image and depth image of the target object, input the color image to the trained instance segmentation network, and obtain the instance segmentation result;
[0037] S2. Cut out the color image block containing the target object from the color image according to the instance segmentation result, and obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More