

Multi-robot formation positioning method based on particle filter and robot equipment
A particle filter, multi-robot technology, applied in position/direction control, two-dimensional position/channel control, instruments and other directions, can solve problems such as insufficient calibration, inaccuracy, inaccurate positioning of lidar scanning, and achieve accurate formation control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
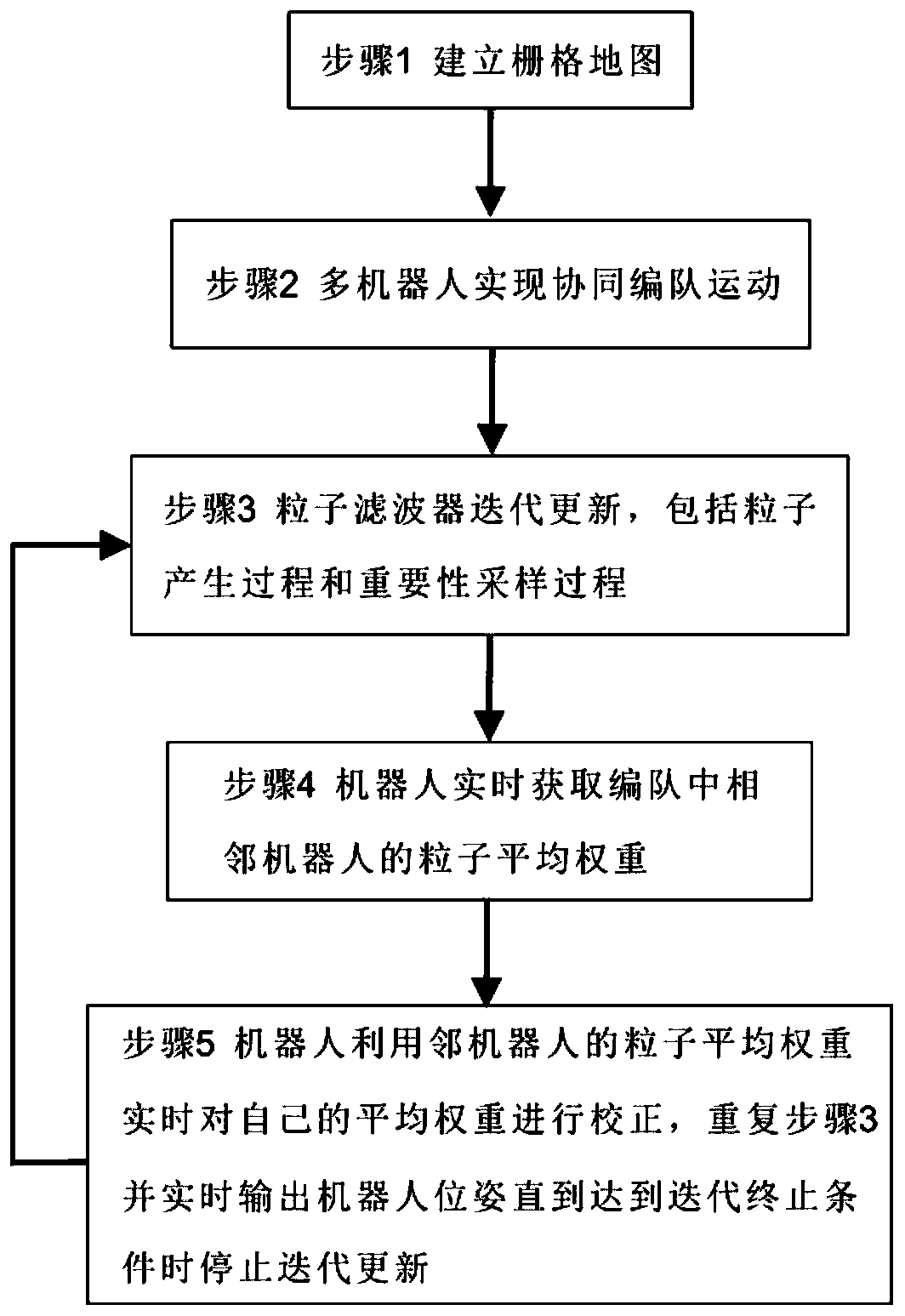
[0034] figure 1 It is a flow chart of the particle filter-based multi-robot formation positioning method of the present invention, including:
[0035] Step 1. Create a grid map.
[0036] Methods for building grid maps include: based on laser or vision sensors, robots move autonomously or users control robots to build maps in the working environment.
[0037] Step 2. Multi-robots realize coordinated formation movement.
[0038] The method of multi-robot cooperative formation movement includes: centralized, distributed or hybrid, such as multiple robots moving in a certain fixed formation in the working environment through the distributed control method of the leader and the follower.
[0039] Step 3. The particle filter is iteratively updated, including the sampling particle generation process and the importance sampling process.
[0040] The process of generating sampling particles is specifically: generating new sampling particles according to the current distribution of p...
Embodiment 2
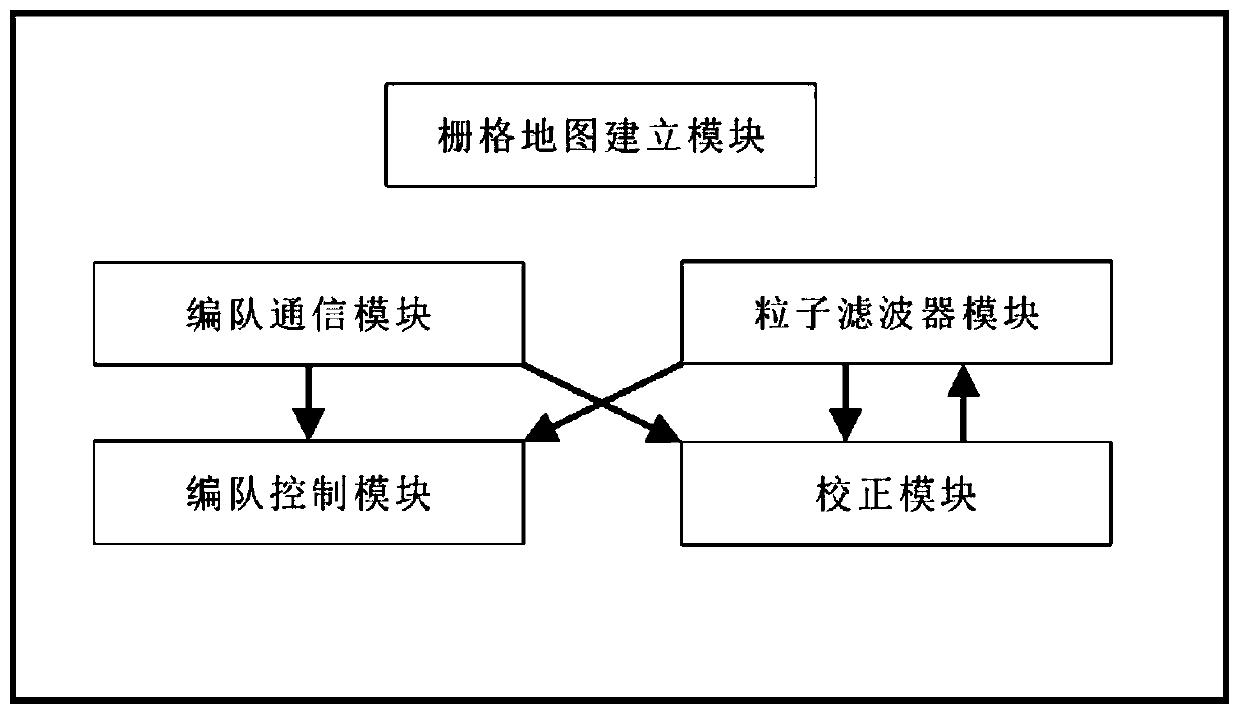
[0052] figure 2 It is a structural schematic diagram of the robot equipment for multi-robot formation positioning based on the particle filter of the present invention, including:
[0053] A grid map building module, used to create a grid map;
[0054] Formation communication module for communicating with neighboring robots or centralized processor;
[0055] The formation control module is used to realize multi-robot coordination and move in a fixed formation;
[0056] The particle filter module is used for the iterative update of the particle filter, including the sampling particle generation process and the importance sampling process; when the iteration termination condition is reached, the iterative update is stopped and the position information of the robot is output;
[0057] The correction module is used to correct the average weight of its own particles by using the average weight of particles of adjacent robots.
[0058] For specific details of each module, refer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More