

High-precision GNSS simulator time synchronization method
A time synchronization and simulator technology, which is applied in the field of flight control system simulation, can solve the problems of large trajectory deviation, increased cumulative time difference, and receiver inability to locate, and achieve high timing resolution, smooth synchronization, and elimination of cumulative time errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
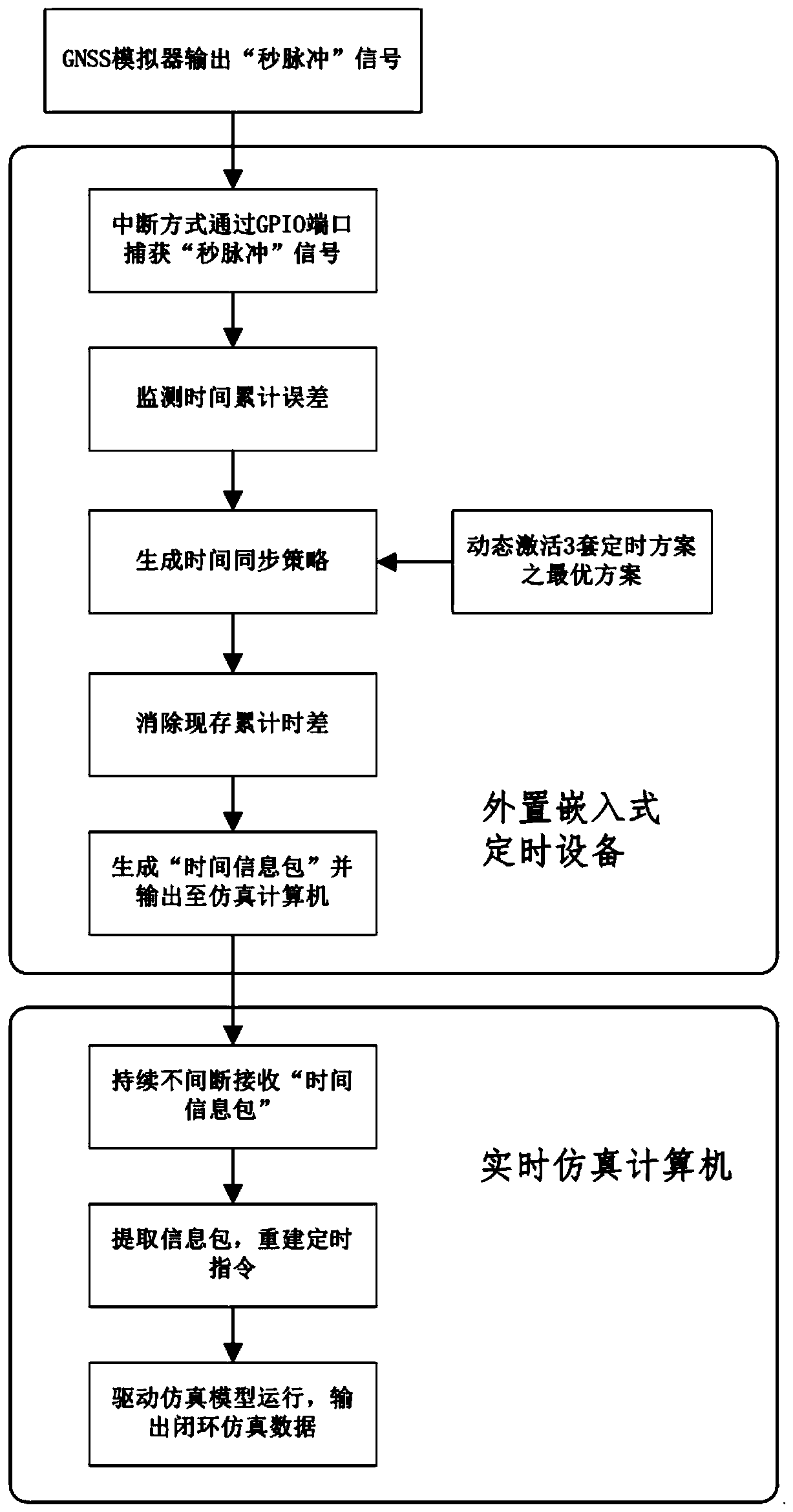
[0028] The specific implementation is as follows:
[0029] Step 1: Because the simulation computer needs a 5-millisecond timing cycle based on the GNSS clock, on the ETD device, center on the local 5-millisecond clock and preset three sets of timing schemes as shown in Table 2, which can achieve ±0.05 ms The adjustment accuracy provides the highest error adjustment rate of ±1.0%, which is enough to cover the error limit of the crystal oscillator relative to the rubidium atomic clock:
[0030] Table 2 Preset Timing Period Table
[0031]
[0032] Step 2: On the ETD device, detect the "second pulse" TTL signal of the GNSS simulator input by the GPIO port in an interrupt mode. When the first "second pulse" is captured, start the timing cycle with the local 5ms as the initial cycle;
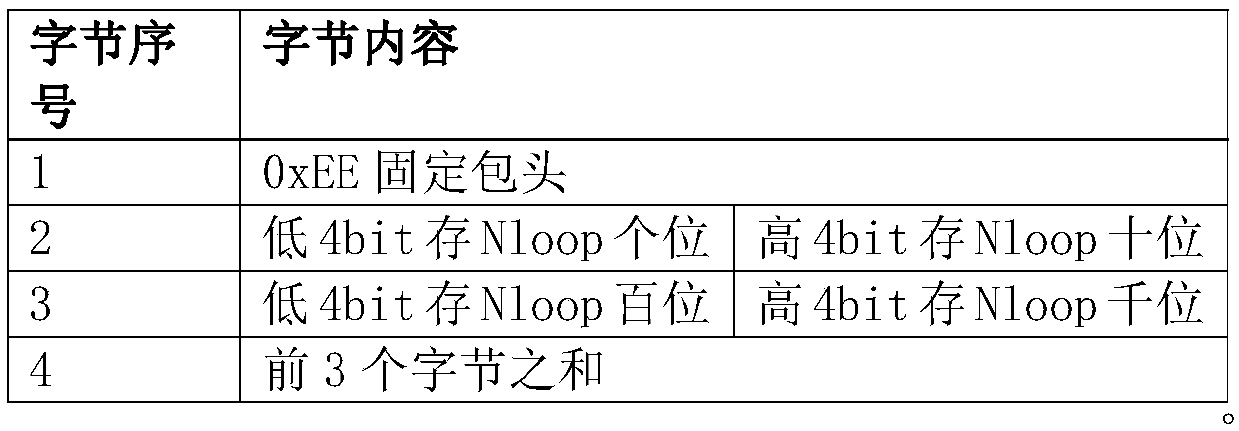
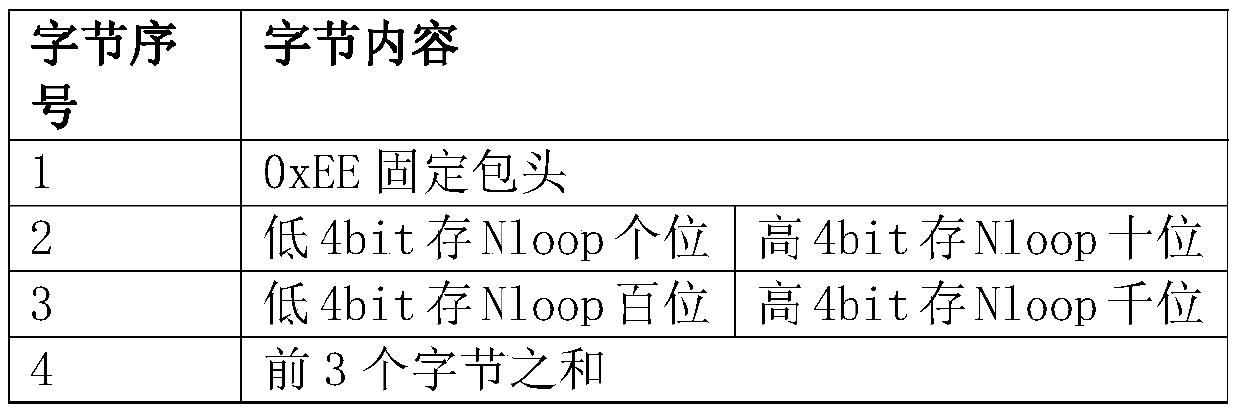
[0033] Step 3: Count in each timing cycle of the ETD device, and add 1 to Nloop; at the same time, when capturing the "second pulse", first add 200 to Npulse (between two adjacent "second pulses")...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More