

Robot Vision Guidance Method and Device Based on Integrating Global Vision and Local Vision
A robot vision and robot technology, applied in the field of robot vision, can solve problems such as non-compliance, low detection accuracy, and inability to achieve processing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0035] A mobile terminal implementing various embodiments of the present invention will now be described with reference to the accompanying drawings. In the following description, use of suffixes such as 'module', 'part' or 'unit' for denoting elements is only for facilitating description of the present invention and has no specific meaning by itself. Therefore, "module" and "component" may be used mixedly.
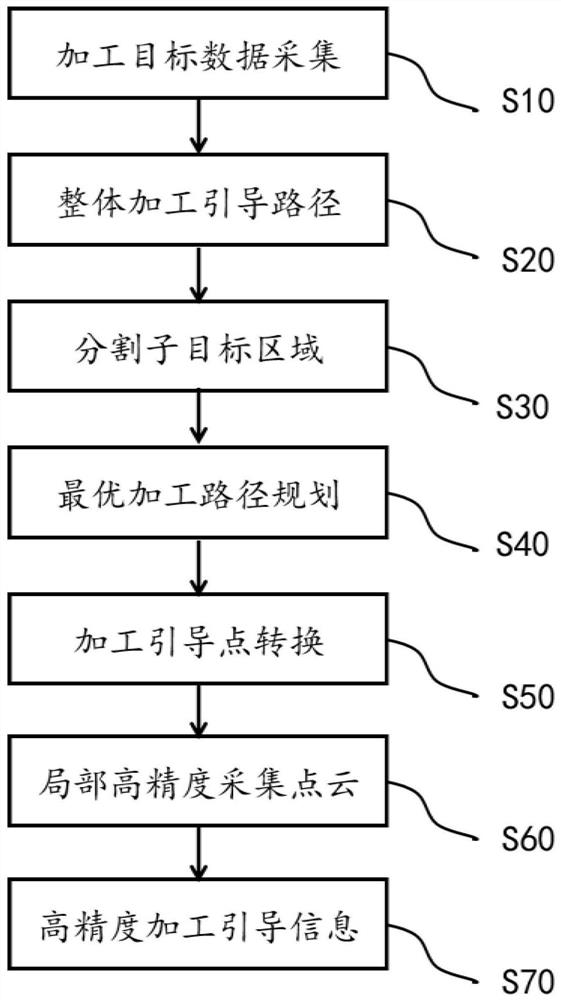
[0036] refer to figure 1 , figure 1 It is a schematic flowchart of the first embodiment of the robot vision guidance method based on the integration of global vision and local vision in the present invention. like figure 1 In the illustrated embodiment, the robot vision guidance method based on blending into global vision and local vision comprises the following steps:
[0037] S10. Collect processing target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More