

Point cloud identification and segmentation method based on Bayesian neural network
A neural network and Bayesian technology, applied in the field of point cloud recognition and segmentation based on Bayesian neural network, can solve the problems of inaccurate penalty function design, can not guarantee the optimal model training effect, etc., to increase the accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
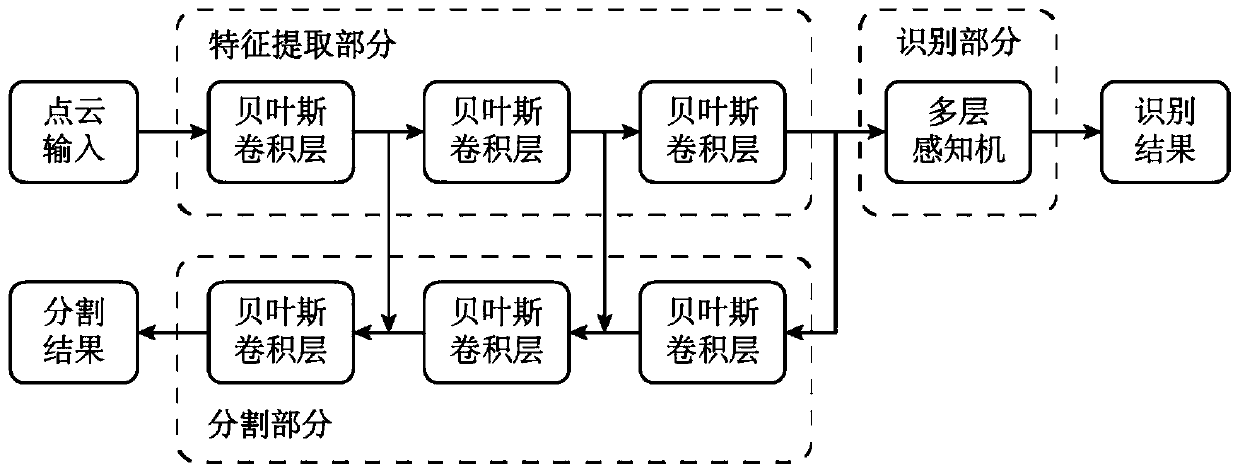
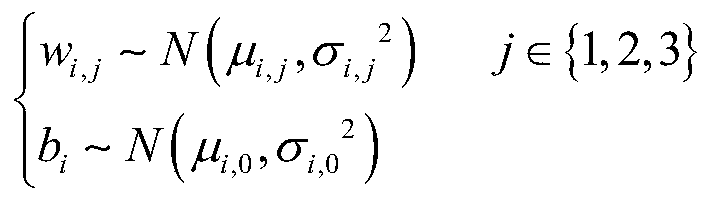
[0018] The Bayesian point cloud convolution kernel proposed by the present invention is divided into n layers, for the i-th layer L i , containing three random weights w i,1 、w i,2 、w i,3 and a random bias b i , these four parameters are in line with the normal distribution, namely:
[0019]
[0020] Among them, μ i,j is the mathematical expectation of the random variable, σ i,j is the standard deviation of the random variable.
[0021] When using the Bayesian convolution kernel to calculate the feature value of the target point in the point cloud, the target point P 0 The neighborhood of is divided into n layers from small to large according to the distance between points, so that each layer contains a fixed number of K points. For the i-th layer L i , which contains points denoted as P i,k (k=1,2,…,K), point P i,k The three-dimensional coordinates...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More