

Double-power four-wheel-drive five-omnidirectional-wheel heavy-load spherical robot
A spherical robot, omnidirectional wheel technology, applied in the direction of wheels, motor vehicles, transportation and packaging, etc., can solve the problems of poor load-bearing capacity, inaccuracy, laborious movement trajectory, etc., to achieve flexible and rapid movement, increase contact area, easy to control Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0046] Example 1: Marching Movement
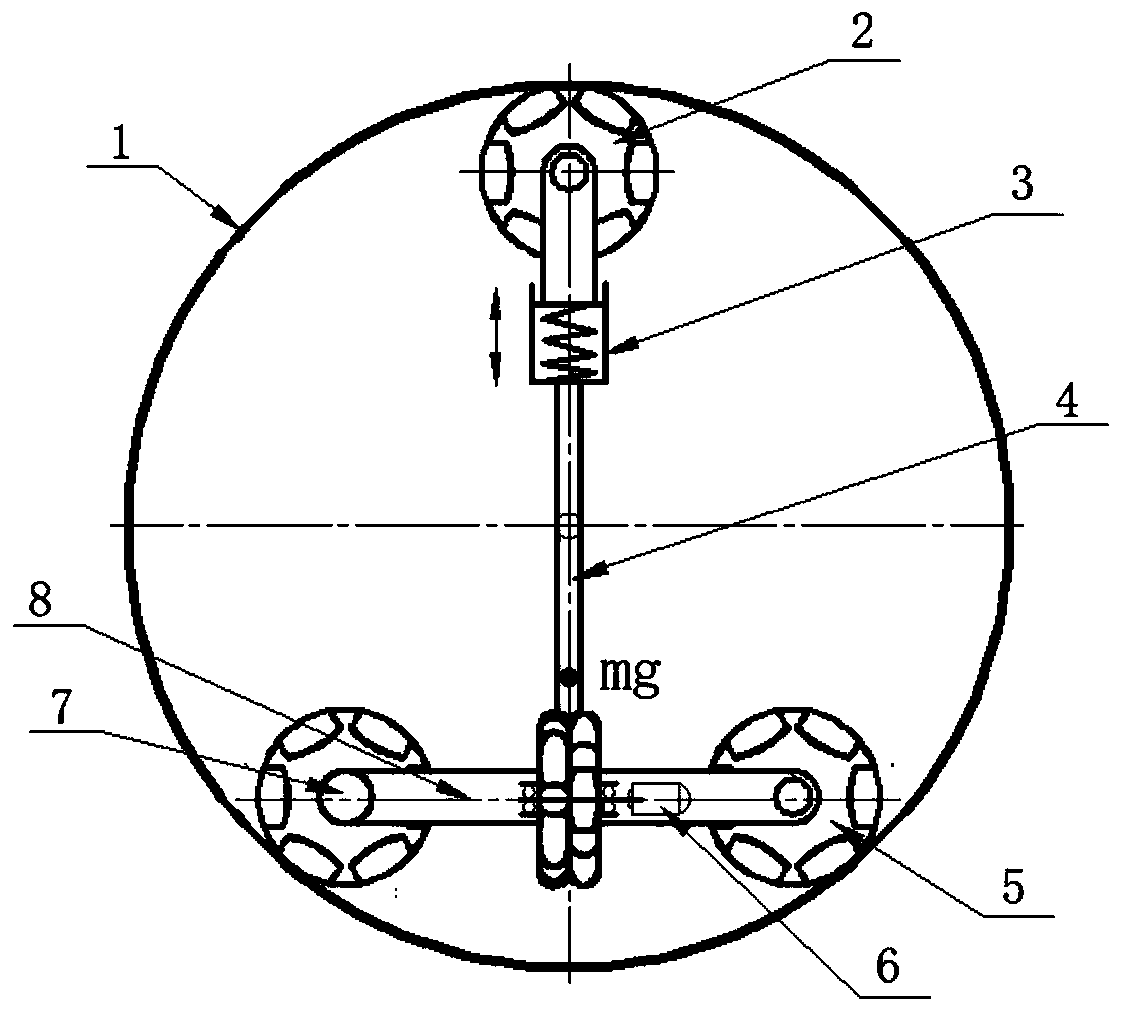
[0047] like Figure 4 As shown, a group of driving omnidirectional wheels 5 is driven by the driving drive 7 to drive the internal device of the sphere to move along the inner surface of the spherical shell, and the position of the center of gravity mg is shifted, thereby generating an eccentric moment to drive the sphere to roll. At this time, another group of driving The movement of the omnidirectional wheels is not affected, and the steering movement can be performed at the same time.
Embodiment 2
[0048] Example 2: Steering Movement
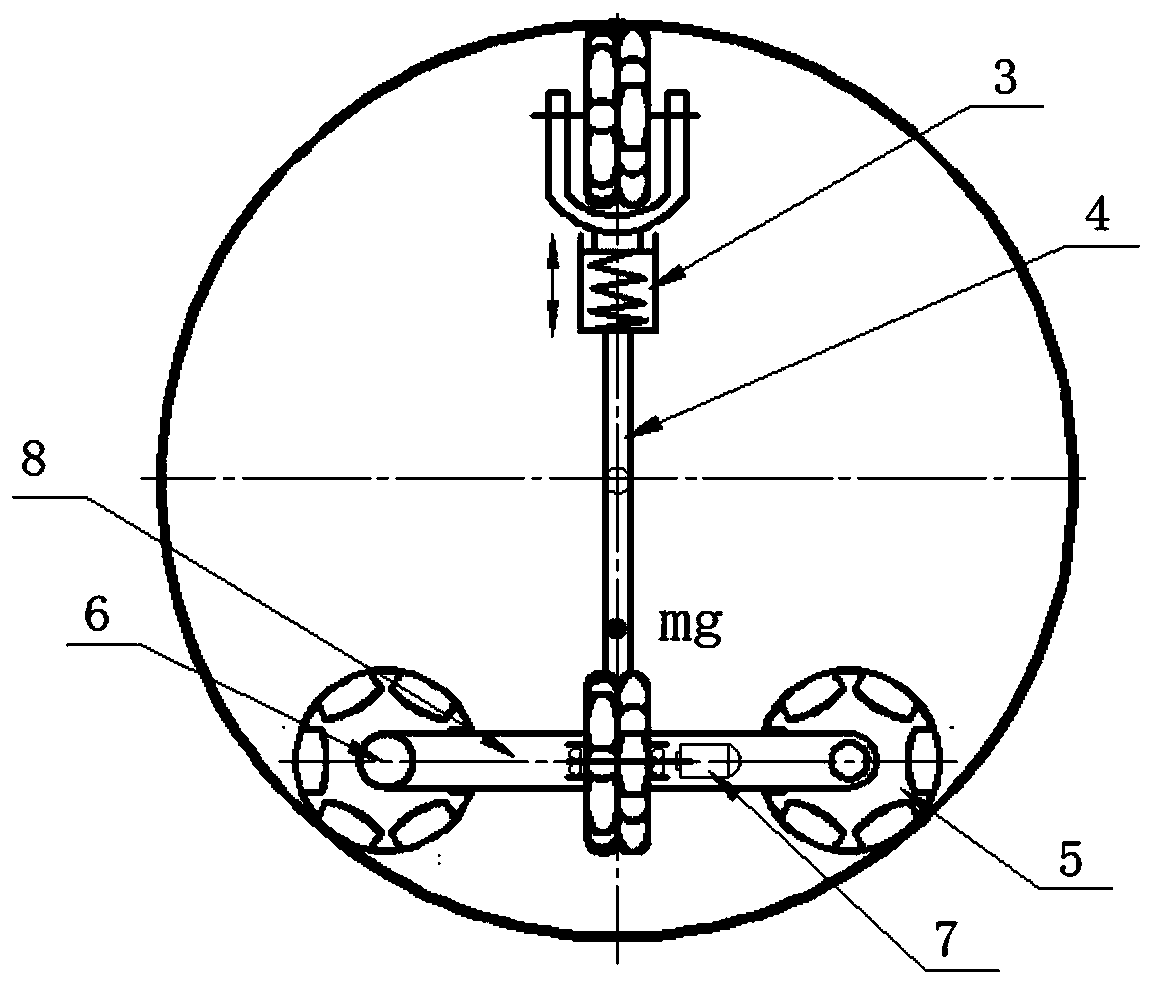
[0049] like Figure 5 As shown, a set of driving omnidirectional wheels 5 is driven by the steering drive 6 to drive the internal device of the sphere to move along the inner surface of the spherical shell, and the position of the center of gravity mg is shifted, thereby generating an eccentric moment to drive the sphere to roll. At this time, another set of driving The motion of the omnidirectional wheels is unaffected and travel motions can be performed simultaneously.
[0050] As can be seen from the technical solutions provided by the above-mentioned embodiments of the present invention, the present invention has the following advantages:
[0051] The invention significantly increases the contact area between the omnidirectional wheel and the spherical shell, thereby distributing the internal pressure of the spherical shell, so as to be able to carry a larger working load.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More