

Coping and polishing method of spiral steel pipe end welding seam coping and polishing robot
A technology of spiral steel pipes and robots, which is applied to the parts of grinding machine tools, grinding/polishing equipment, surface polishing machine tools, etc., can solve problems such as unsatisfactory quality, and achieve high reliability and automatic identification for automatic fine grinding, replacement and maintenance Simple and convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
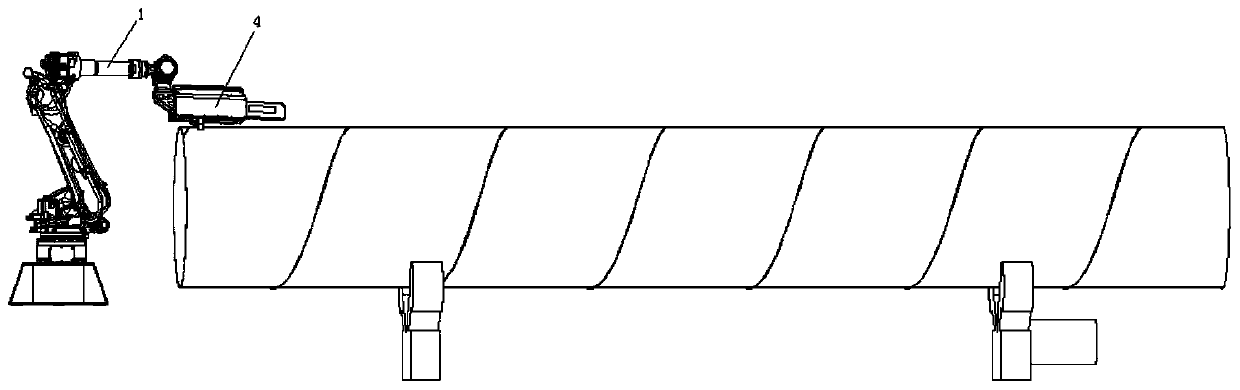
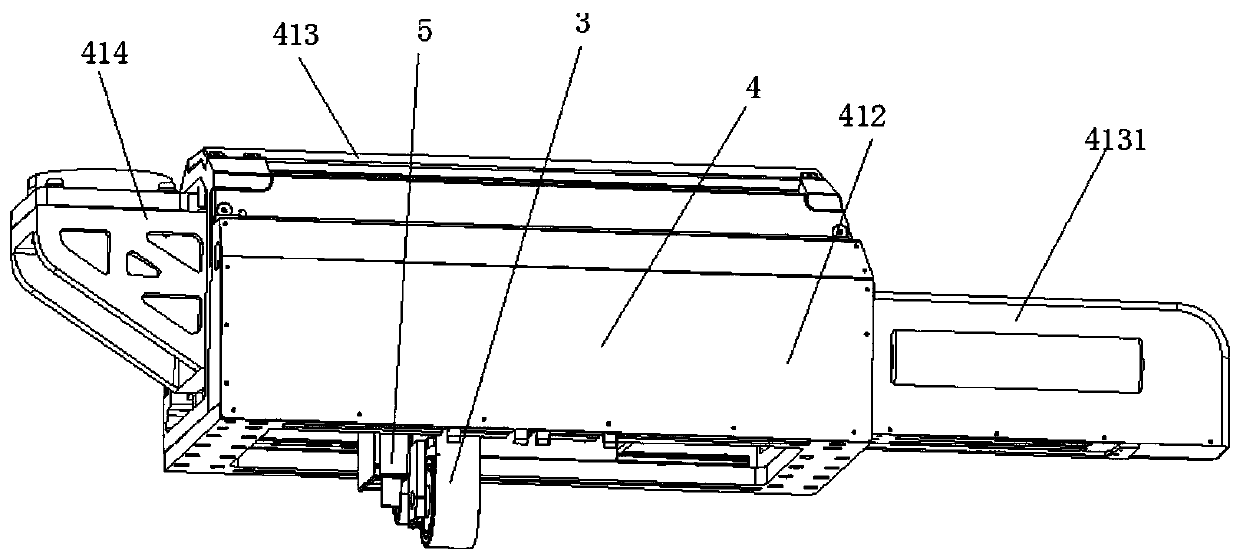
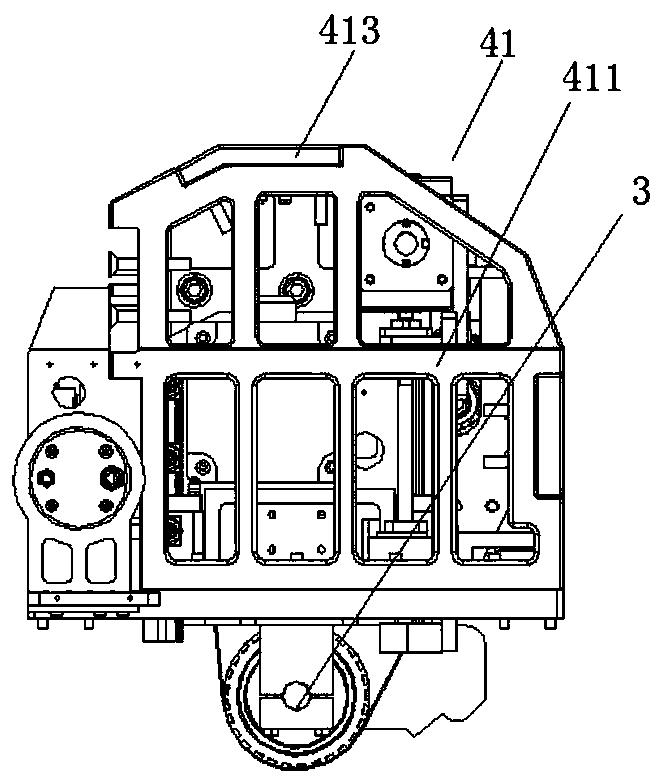
[0083] Attached below Figure 1-40 Specific examples of the present invention are described. It should be understood that the embodiments described below are only illustrative rather than specific limitations on the present invention.
[0084] The following examples facilitate a better understanding of the present invention, but do not limit the present invention. The experimental methods in the following examples are conventional methods unless otherwise specified. The components and materials used in the following examples are commercially available unless otherwise specified. The implementation of the control circuit in the following embodiments is a conventional control method unless otherwise specified.
[0085] In the present invention, unless stated otherwise, it should be understood that the terms "center", "upper", "lower", "front", "rear", "left", "right", "vertical The orientations or positional relationships indicated by "straight", "horizontal", "top", "bottom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More