

Glass cleaning robot and cleaning method
A technology for cleaning robots and cleaning water, applied in cleaning machinery, machine parts, aircraft, etc., can solve the problems of high energy consumption, low precision of cleaning drones, and small scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
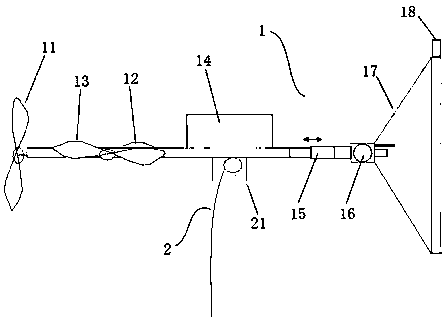
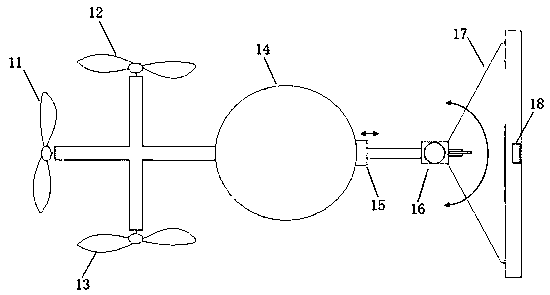
[0073] This embodiment provides a cleaning robot, such as figure 1 , figure 2 and Figure 6 As shown, it includes: UAV 1, tethered rope 2 and ground trolley 3; for example, UAV 1 is a quadrotor UAV or others.
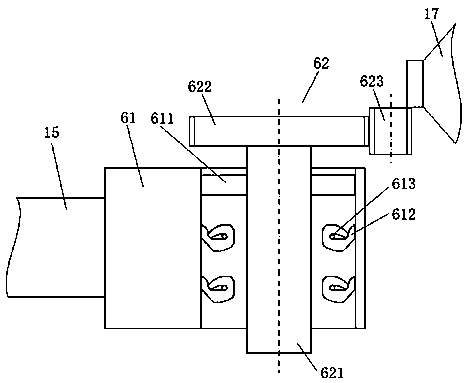
[0074] UAV 1 comprises cleaning reaction force regulating device, four-rotor mounting base 14, telescopic rod device 15, steering gear 16, cleaning device 17 and distance and angle detection device 18; Connection; the telescopic long rod device 15 is installed directly below the center of gravity of the four-rotor mounting base 14, and includes a telescopically adjustable long rod for driving the cleaning device 17 to move forward and backward with the telescopic adjustment of the long rod; the steering device 16 includes The fixed seat 61 and the rotating body 62, the fixed seat 61 is connected with one end of the telescopic rod device 15, the rotating body 62 is connected with the cleaning device 17, and is used to drive the cleaning device 17 to rotate left and ri...
Embodiment 2
[0085] Cleaning preparation: After the control parameters are input into the controller of the ground trolley, for example, the GPS / Beidou positioning module is used to control the ground trolley to travel to the predetermined position. At the same time as the UAV takes off, the mooring hoisting device on the ground trolley is controlled by the tension controller The hoisting reel releases the mooring rope with the take-off speed of the UAV; the UAV flies to the preset working height and feeds back to the ground trolley, and the ground trolley controls the cleaning water and cleaning fluid in the liquid storage device to be sent through the tethering rope. to the drone cleaning unit.
[0086] After completing the preparatory steps for cleaning, this embodiment provides a cleaning method that can be applied to the controller 32 to complete the cleaning. Such as Figure 7 As shown, the cleaning method includes the following steps:
[0087] S1. Obtain the angle between the end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More