

Agricultural park scene lane departure early warning control method and system based on end-to-end convolutional neural network
A technology of convolutional neural network and lane deviation, which is applied in the field of early warning and control of lane deviation in agricultural garden scenes based on end-to-end convolutional neural network. Manual testing and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
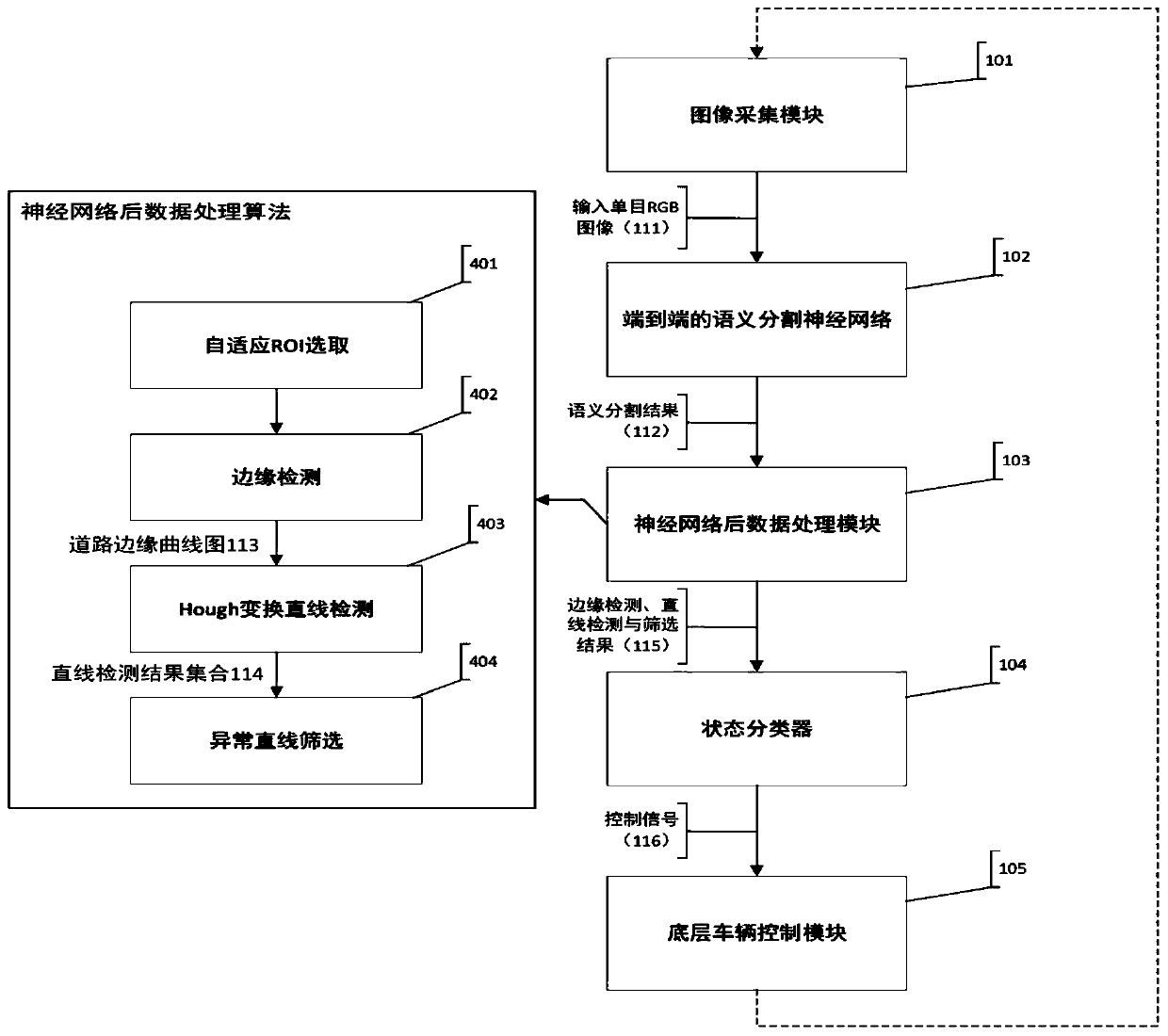
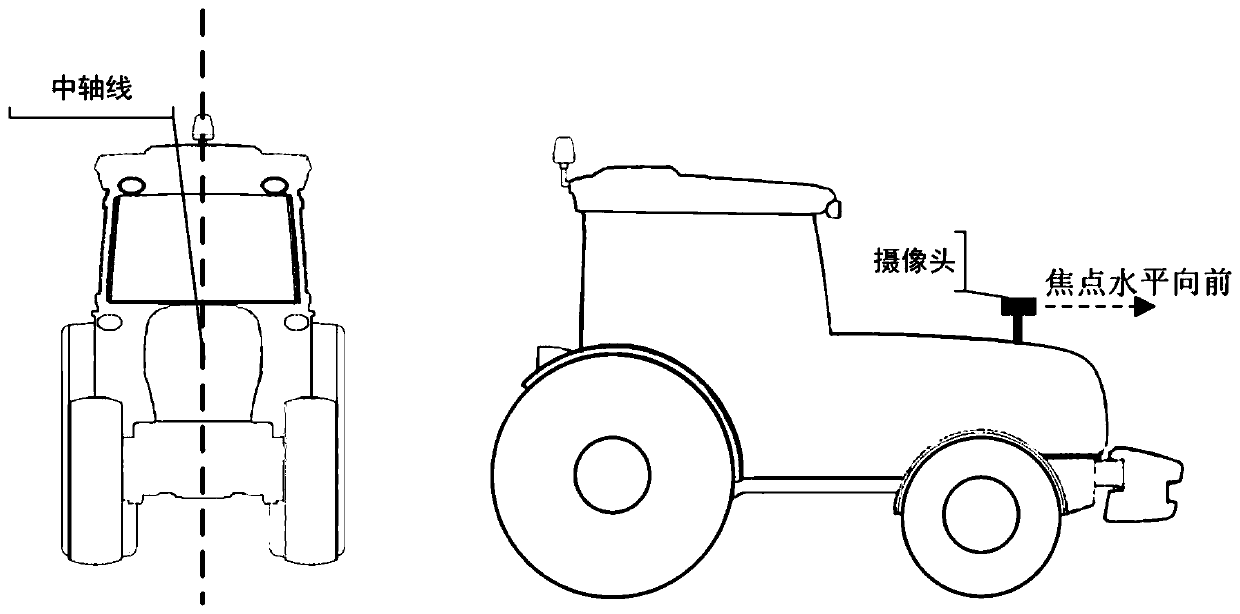
[0059] like Figure 1 to Figure 3 As shown, the present embodiment provides an end-to-end convolutional neural network-based lane deviation early warning control system for agricultural garden scenes, which consists of an image acquisition module 101, an end-to-end semantic segmentation neural network 102, and post-neural network data processing module 103, state classifier 104 and bottom vehicle control module 105. The data stream consists of input monocular RGB image 111 , semantic segmentation result 112 , road edge graph 113 , line detection result set 114 , edge detection, line detection and filtering result 115 , and control signal 116 . An imaging device capable of capturing images of the current road surface and both sides of the road surface is installed on the central axis of the vehicle.
[0060] In this embodiment, an end-to-end convolutional neural network-based lane deviation early warning control method for an agricultural garden scene includes the following st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More