

Vehicle spatial form recognition method and system based on contour constraint
A technology of spatial form and identification method, applied in the field of intelligent transportation, can solve the problems of high cost and inability to further identify the three-dimensional information of vehicles, and achieve the effect of high stability and accuracy, wide application and universality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
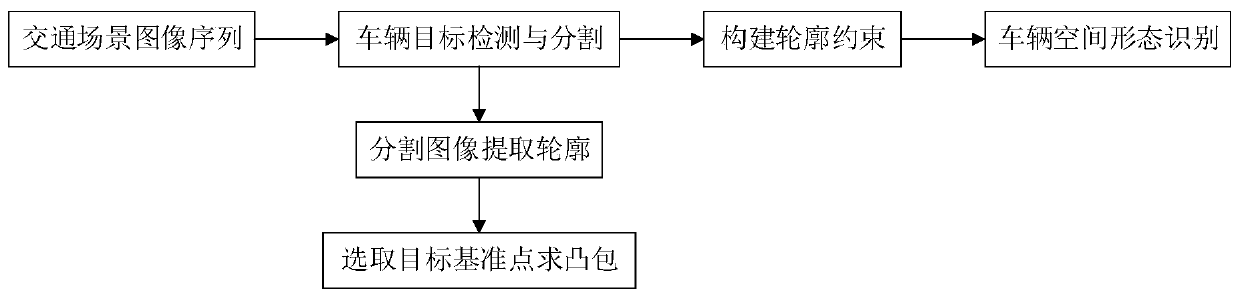
[0043] Such as Figure 1 to Figure 8 As shown, the present invention discloses a vehicle space shape recognition method based on contour constraints, and the detailed steps are as follows:
[0044] Step 1, input the traffic video, obtain the video image of each frame, and form an image sequence;
[0045] Step 2, extract the vanishing point from the video image obtained in step 1, establish the camera model and coordinate system, the two-dimensional envelope model and the three-dimensional envelope frame model of the vehicle target in the image coordinate system, and perform camera calibration in combination with the vanishing point, Obtain camera calibration parameters and horizon information;
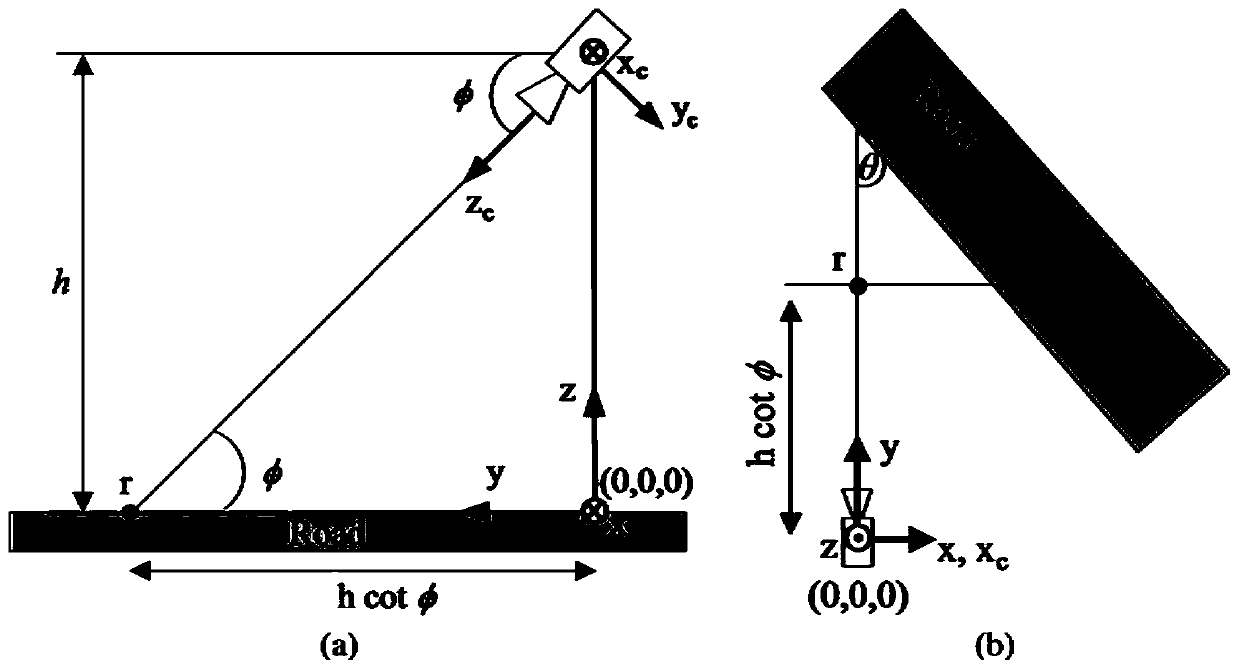
[0046] Refer to the method of the paper "A Taxonomy and Analysis of Camera Calibration Methods for Traffic Monitoring Applications", such as figure 2 As shown, establish the camera model, world coordinate system O-XYZ, camera coordinate system O-X C Y C Z C , The image coordinate...
Embodiment 2
[0078] This embodiment provides a vehicle space shape recognition system based on contour constraints, the system includes:
[0079] The data input module is used to input the traffic video, obtains the video image of each frame, and forms an image sequence;
[0080] The camera calibration module is used to establish the camera model and coordinate system, the two-dimensional envelope model and the three-dimensional envelope frame model of the vehicle target in the image coordinate system, perform camera calibration, and obtain the internal and external parameters of the camera and the horizon information of the scene;
[0081] The vehicle target detection and segmentation module is used to detect and segment the vehicle target in the video image using the method of deep learning Mask RCNN. The detection result includes the two-dimensional coordinate information of the vehicle target under the two-dimensional envelope model and the vehicle target The vehicle category of , the ...
Embodiment 3
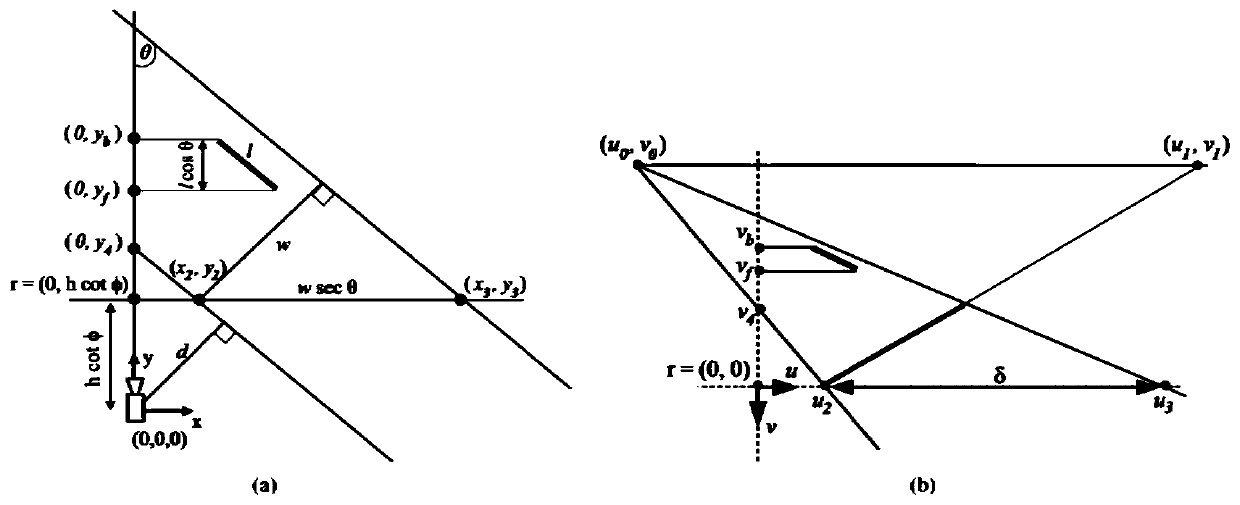
[0085] In order to verify the validity of the method proposed by the present invention, an embodiment of the present invention adopts the following Figure 4 Shown is an image of an actual road traffic scene in which a single vanishing point along the road direction is identified and the camera is calibrated. Such as Figure 6 As shown, on this basis, the vehicle target is detected and segmented by the method of deep learning Mask RCNN, and the coordinates of the three-dimensional envelope reference point of the vehicle target in the image coordinate system are obtained. Such as Figure 7 Shown is a schematic diagram of constructing contour constraints, combined with the calibration results, constructing contour constraints and solving them. Such as Figure 8 Shown is the result map of vehicle space shape recognition.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More