

Self-adaptive path tracking control method of unmanned surface vehicle based on waypoints
A control method and path tracking technology, applied in the field of control, can solve the problems of low turning tracking accuracy and large overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0066] This embodiment is a waypoint-based self-adaptive path tracking control method for surface unmanned boats. Before describing the specific control scheme, firstly, the parameters and related key technologies will be explained.
[0067] The parameters involved in the present invention are defined as follows:
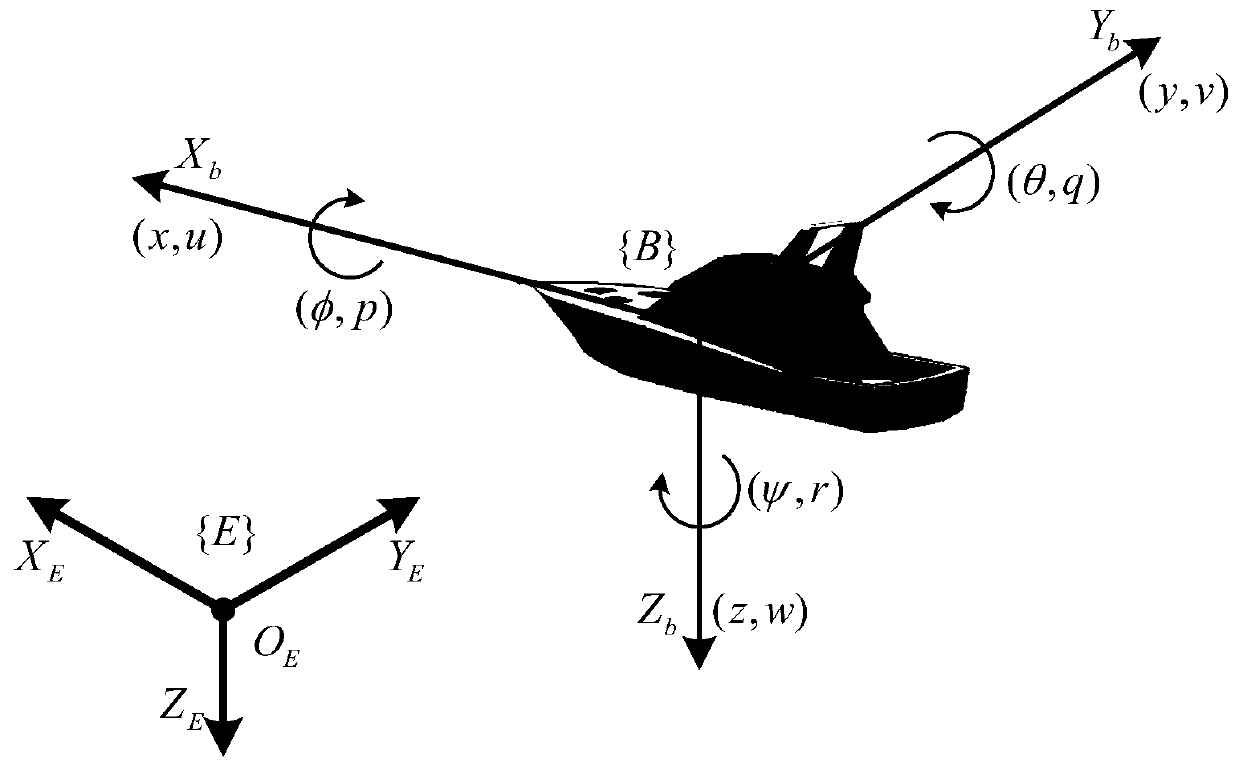
[0068] η=[x,y,ψ] T is the position and heading angle of the USV in the geodetic coordinate system {E}; v=[u,v,r] T is the longitudinal velocity, transverse velocity and heading angular velocity of the USV in the hull coordinate system {B}; J(ψ)∈R 3×3 is the rotation matrix of the UAV from the hull coordinate system {B} to the earth coordinate system {E}; M∈R 3×3 is the inertia matrix; C(v)∈R 3×3 is the matrix of Coriolis force and centripetal force; D∈R 3×3 is the damping force matrix; B∈R 3×2 Configure the matrix for the actuator; f = [f u ,f r ] T is the input quantity of the control, where f u is the propeller thrust, f r is the moment generated by the ...
Embodiment
[0137] In order to verify the effectiveness and efficiency of the path tracking control algorithm proposed by the present invention, it is now applied to an unmanned ship model for verification. In the Cartesian coordinate system, define the X axis as the true east direction, the Y axis as the true north direction, and rotate along the positive half axis of the Y axis.
[0138] The initial state of the unmanned boat is set to [x(0), y(0), ψ(0)] T =[31m,25m,-40°] T 、[u(0),v(0),r(0)] T =[0m / s, 0m / s, 0rad / s] T , with a maximum velocity of v max =2.5m / s, parameter R min = 3m, R k = 2m, δ = 2m, δ max = 30°, k 1 = 3,k 2 =k 3 =k 4 =k 5 = 2, k=0.01, the designed path point information is as follows:
[0139] Table 1 Waypoint information
[0140]
[0141] The simulation effect of the present invention is as Figure 4 to Figure 7 shown, where Figure 4 is the path tracing simulation graph, Figure 5 is the path deviation simulation diagram, Image 6 is the speed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More