

Pattern recognition method and system based on airbag array tactile sensing
A tactile perception and pattern recognition technology, applied in the field of pattern recognition methods and systems based on airbag array tactile perception, can solve the problems of over-fitting and low recognition accuracy, and achieve good robustness, high accuracy, and improved The effect of the model prediction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
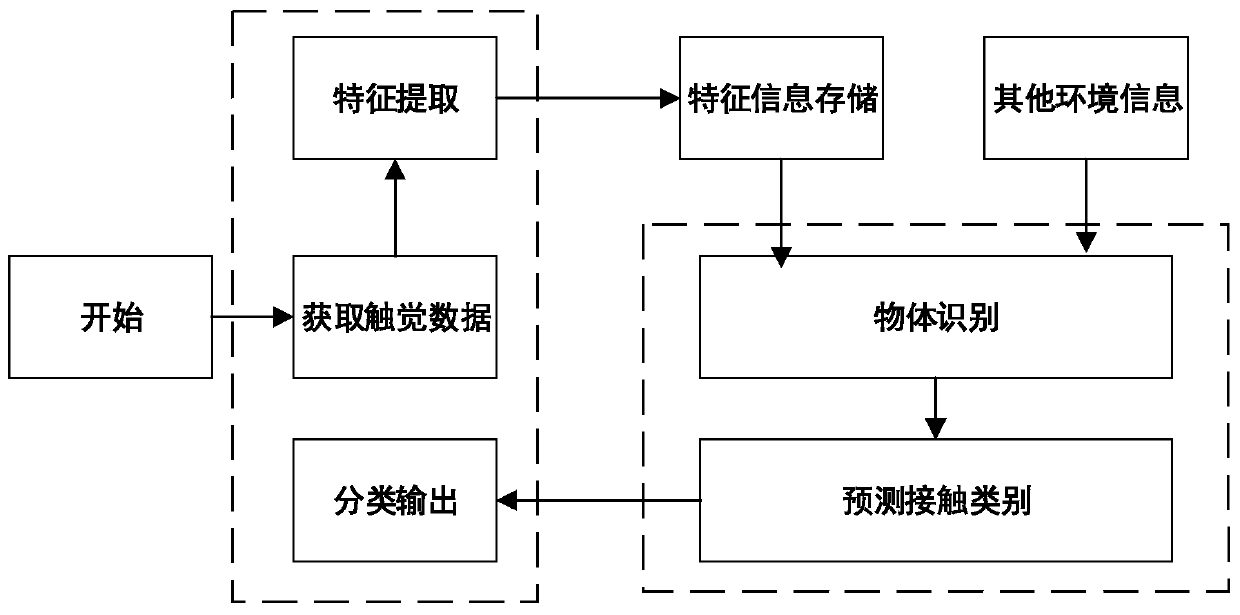
[0041] Such as figure 1 As shown, the airbag array type tactile sensing pattern recognition method provided by this embodiment is aimed at the tactile sensing process of the airbag array robot skin sensor. The method trains the collected tactile data to obtain a pattern recognition model and uses the training method Realize the identification of new data.
[0042] The method provided in this embodiment uses a flexible robot skin sensor based on an airbag array, and the airbag array collects air pressure information when it contacts an object, and trains a machine learning fusion algorithm model to recognize the shape type and object type of the contacting robot skin; from the object contact angle, the airbag The haptic data extracted under the dynamic environment where the array contact position changes are trained, so that the trained model has better robustness. The use of geometric characteristics of different shapes of objects and different physical objects (including human-c...
Embodiment 2
[0051] The new machine learning algorithm fusion pattern recognition method based on the airbag array touch sensing skin sensor provided in this embodiment requires data collection and response dynamic dynamic characteristic measurement of the airbag array touch sensing mechanism to ensure the reliability and accuracy of the experimental data , Including the following steps:
[0052] Step 1. For the airbag array skin sensor attached to the smart robot, there are n airbag units in the horizontal and vertical directions to form an n*n linear array, which is calibrated in a specific test environment to test the reliability of the skin sensor's tactile perception;
[0053] The airbag array skin sensor provided in this embodiment is fixed on a horizontal test platform, and the static characteristics of the skin sensor are calibrated to obtain the stiffness, force displacement and other static characteristics of the airbag array skin. In this embodiment, the MTS pressure testing machine ...
Embodiment 3
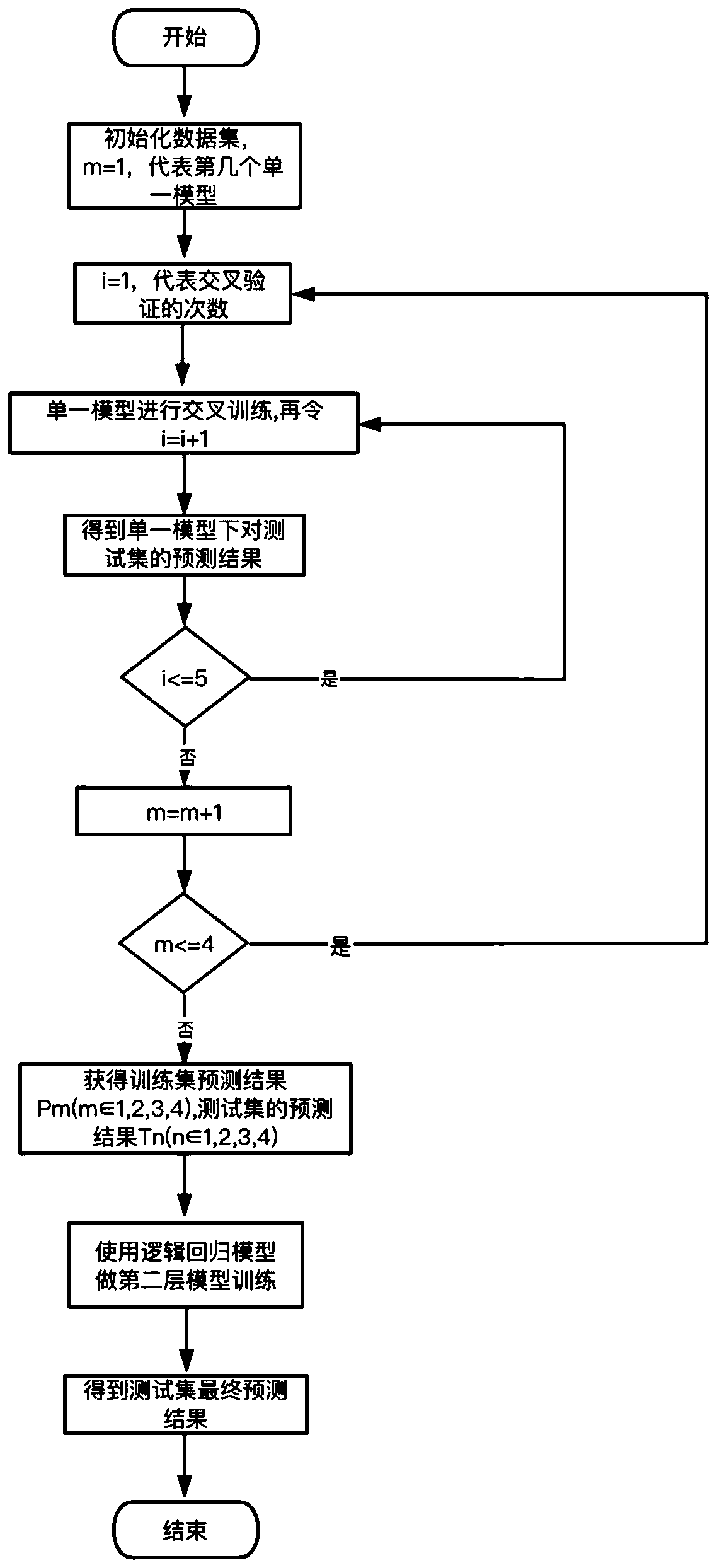
[0063] Such as figure 2 As shown, figure 2 It is a schematic diagram of the stacking model integration strategy process. The fusion algorithm model provided in this embodiment is established by stacking layered model integration method and machine learning algorithm. The stacking layered model integration method is an effective method to solve the fusion between heterogeneous models , Can effectively improve the generalization ability of the model, reduce the phenomenon of over-fitting, and improve the overall effect of the model. The specific steps are as follows:
[0064] S1: Initialize the data set, m=1, representing the m-th single model, and the single model includes one of decision trees, random forests, XG-Boost or LightGBM;
[0065] S2: Set i=1, i represents the number of cross-validation;
[0066] S3: Cross training for a single model, and then set i=i+1;
[0067] S4: Obtain the prediction results of the training set and the test set under a single model;
[0068] S5: judg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More