Aerial and ground cooperated agricultural robot precise pesticide application method and system
It is a technology of robot precision and air-ground coordination, which is applied in animal husbandry, devices and applications for catching or killing insects, etc., to achieve the effect of reducing manual work intensity, pesticide residues, and movement strokes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
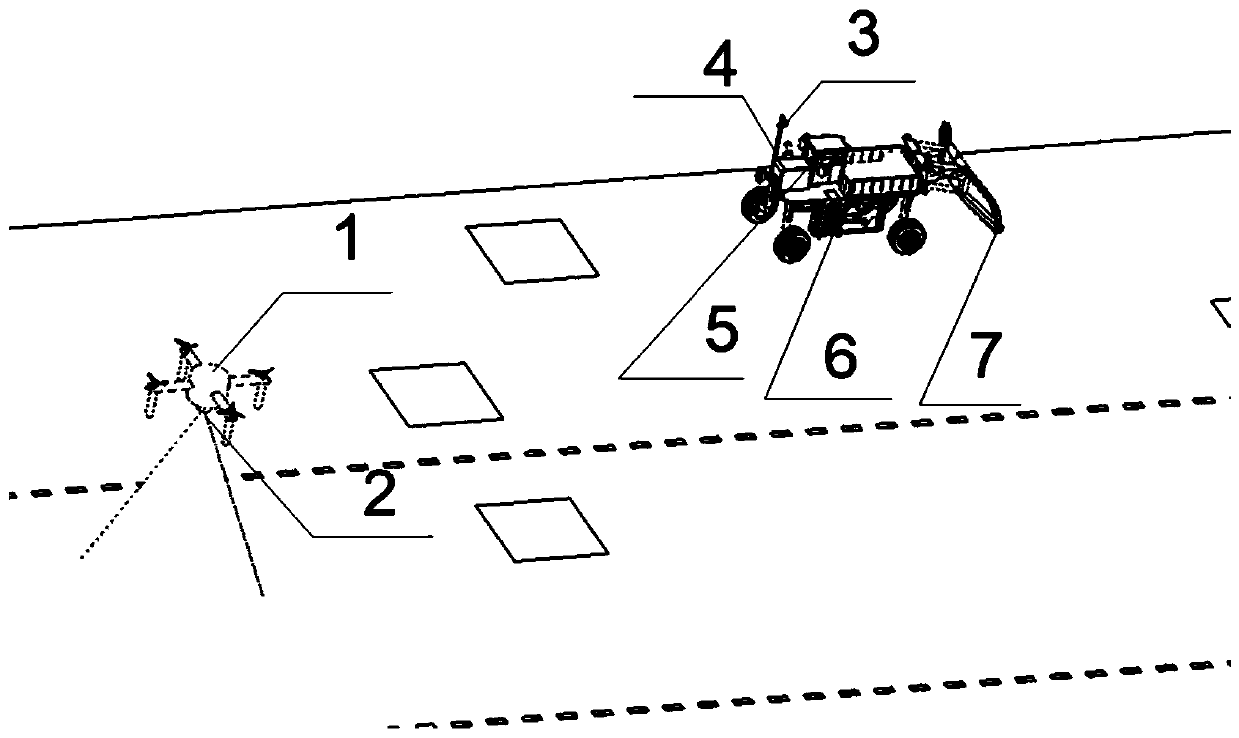
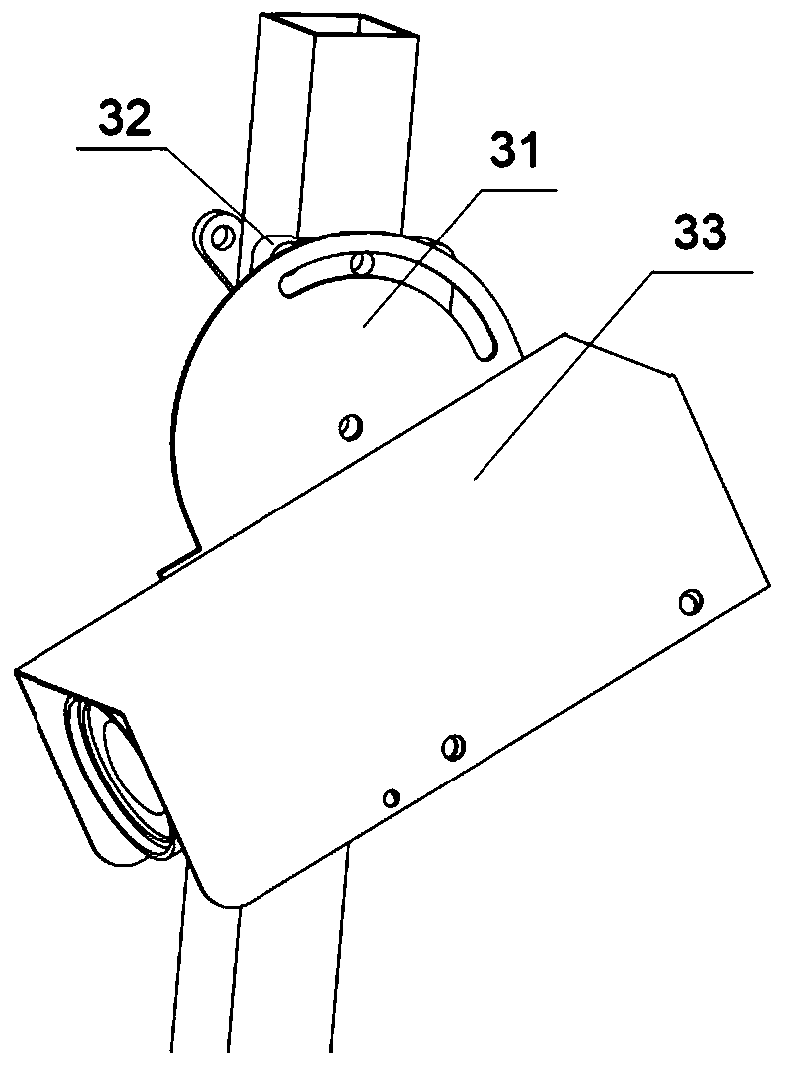
[0041] Such as figure 1 As shown, in order to realize fast and accurate identification of diseases, insect pests and weeds on crops, and to perform precise pesticide application on the area to be treated, the present invention adopts an air-ground collaborative precision pesticide application system composed of a drone 1 and a ground robot 6, wherein the wireless The man-machine 1 is provided with an aerial vision camera 2 for obtaining crop image information below the unmanned aerial vehicle 1; the front end of the ground robot 6 is equipped with a ground vision camera 3 through a vertically arranged vision camera bracket 4; The rear end of 6 is provided with spraying actuator 7; UAV 1 is equipped with microprocessor, and ground robot 6 is equipped with industrial computer 5. The spraying actuator 7 is loaded with various pesticides for diseases, inse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com