

Hexapod robot obstacle avoidance method based on adaptive weight reinforcement learning
A hexapod robot, self-adaptive weight technology, applied in the direction of self-adaptive control, instrument, control/regulation system, etc., can solve the problem that the robot cannot walk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
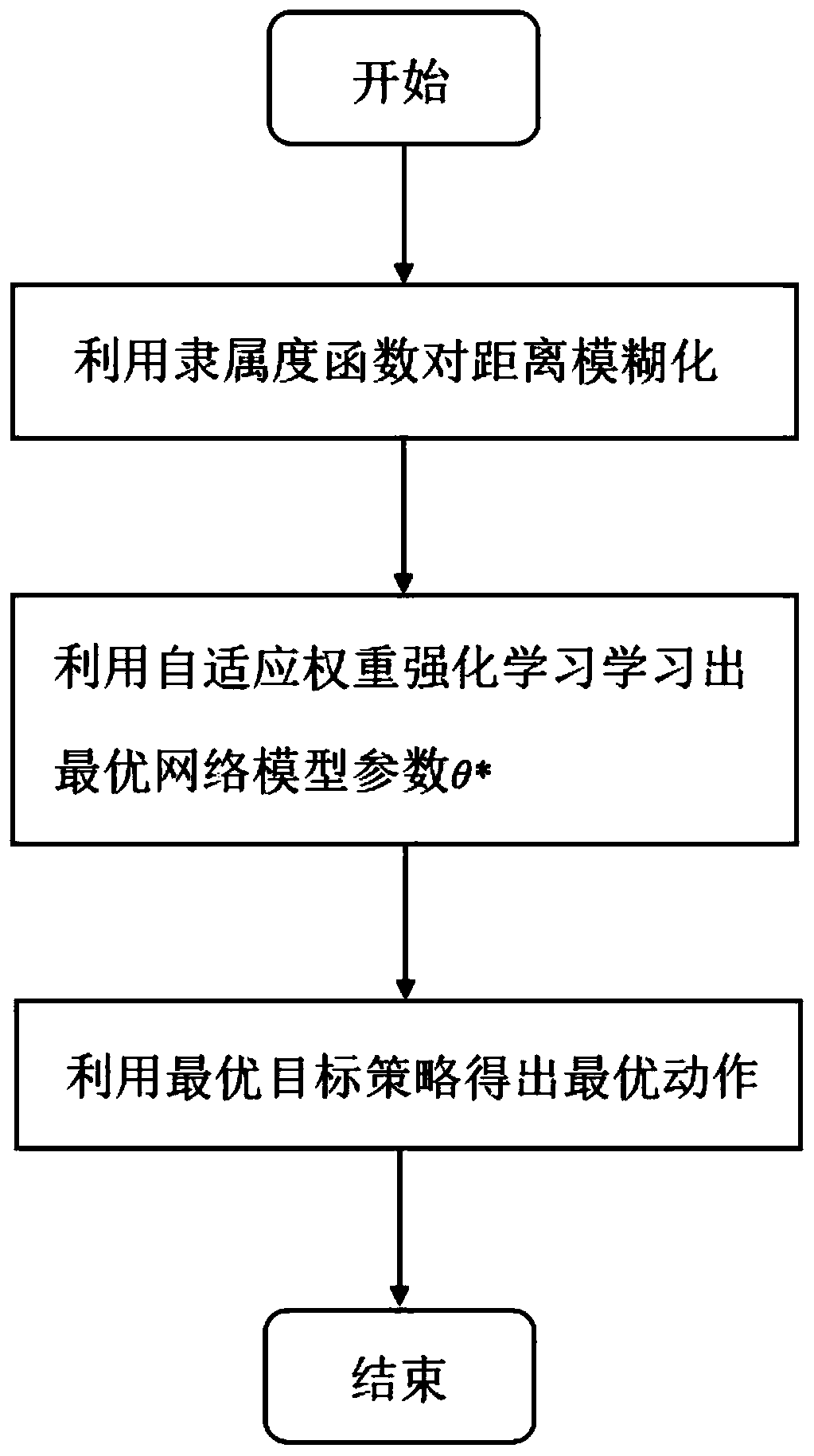
[0069] like figure 1 As shown, the hexapod robot obstacle avoidance method based on adaptive weight reinforcement learning disclosed by the present invention includes the following steps:
[0070] Step 1: The hexapod robot measures the distance between the robot and obstacles in the front, left and right directions through the ranging sensor, and converts the measured obstacle distance into a finite set of states through the fuzzy membership function;
[0071] Step 2. Establish a hexapod robot obstacle avoidance model according to the limited state set, and then use the adaptive weight reinforcement learning algorithm to learn the optimal network model parameters θ*;
[0072] Step 3: Obtain the optimal target strategy of the hexapod robot for obstacle avoidance according to the above-mentioned trained optimal network model parameters θ*, and obtain the action a to be taken by the hexapod robot for obstacle avoidance at time t from the optimal target strategy t .
[0073] Fur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More