

Unmanned aerial vehicle humanoid intelligent control method
A technology of intelligent control and intelligent controller, applied in attitude control, electric controller, non-electric variable control, etc., can solve problems such as lack of adaptability, cumbersome adjustment process, and large quadrotor control error
Pending Publication Date: 2020-08-25
HANGZHOU DIANZI UNIV
View PDF6 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the adjustment process of the traditional cascade PID is too cumbersome and there is no adaptability of self-tuning parameters, and there are often problems such as large errors in the quadrotor control. Combined new quadrotor controller—a quadrotor humanoid intelligent controller based on particle swarm algorithm
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
[0340] Complete the modeling of the quadrotor fuselage through the quadrotor dynamic model and mathematical model, and build the simulation model in the simulink environment
[0341] angle response
[0342] In this experiment, the roll angle is taken as an example. Let the initial angle be 0 degrees, and now use 30 degrees as the input of the particle swarm quadrotor humanoid controller and the cascade PID controller respectively, and observe whether the quadrotor controller designed in this paper can quickly return to the equilibrium state. The simulation results are attached Figure 4 .
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention provides a humanoid intelligent control method for an unmanned aerial vehicle. The method comprises steps of determining an unmanned aerial vehicle flight mathematical model; designing ahumanoid intelligent controller; the humanoid intelligent control comprising a three-layer structure of an operation control layer, a parameter correction layer and a task adaptation layer; and finally, optimizing a proportional differential coefficient by adopting particle swarm optimization. The humanoid intelligent controller can determine a change strategy according to the deviation of the adjusted quantity and a change trend of the deviation, and a PID control parameter self-adaption problem of the four-rotor aircraft can be effectively solved, however, the proportion, the differential coefficient and the attenuation coefficient in humanoid intelligent control can influence the final control effect, so the particle swarm optimization algorithm is adopted to perform parameter optimization. Therefore, the humanoid intelligent controller based on the particle swarm algorithm can realize quick response of the angle of the unmanned aerial vehicle, and stability and anti-interference performance are improved.
Description
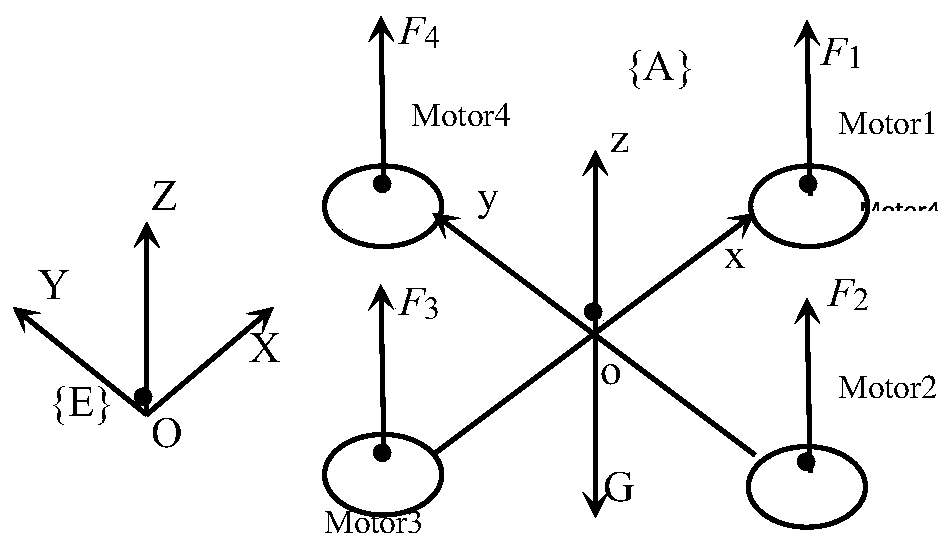
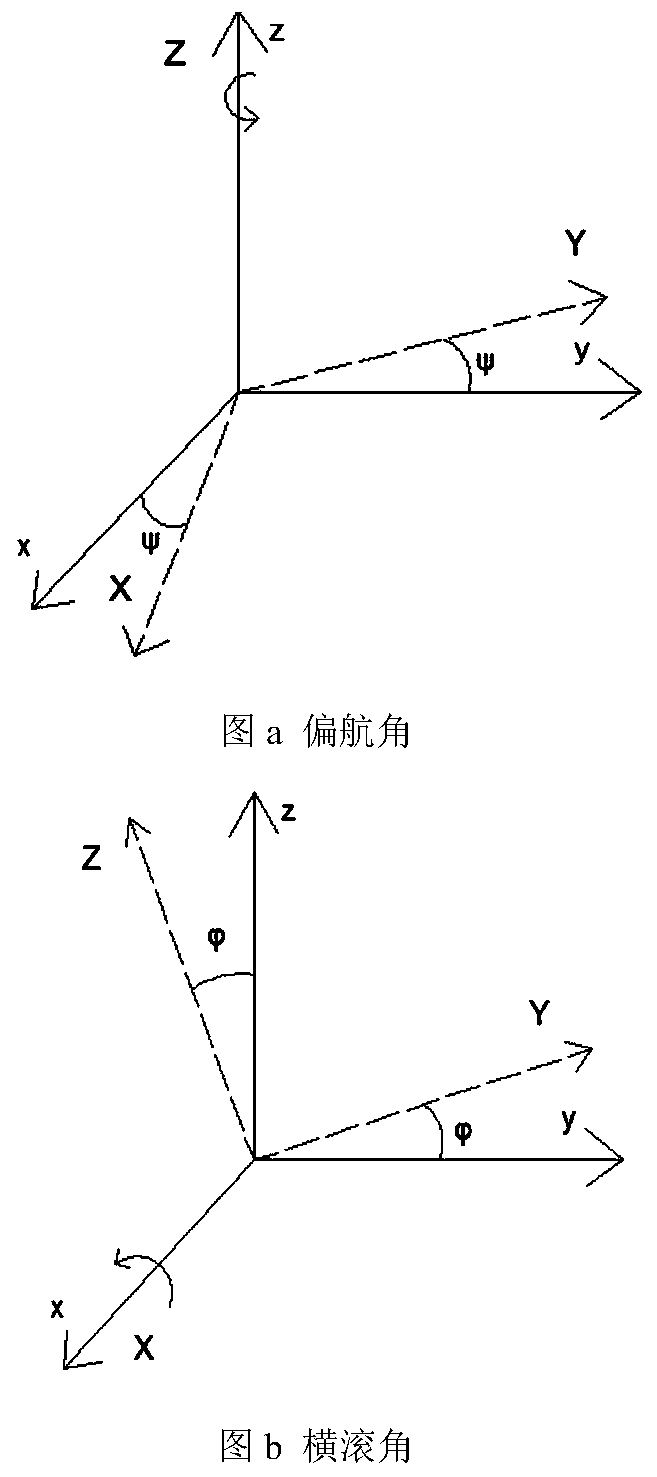
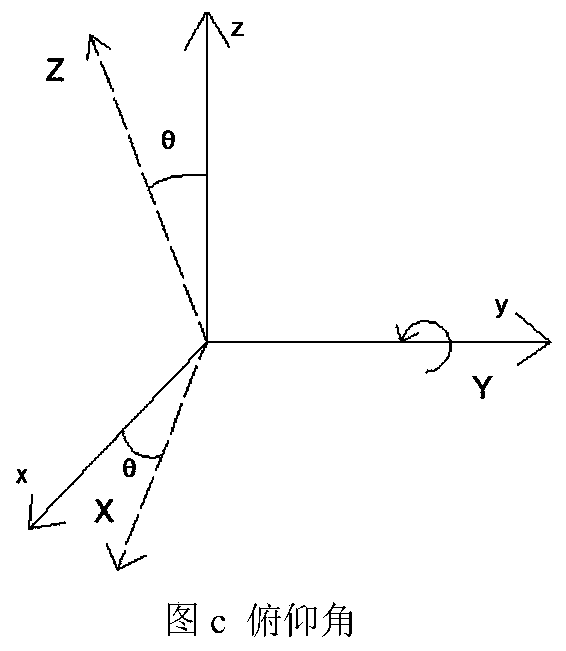
technical field [0001] The invention belongs to the field of unmanned aerial vehicle flight control, especially for the flight control of a single unmanned aerial vehicle, and specifically designs a humanoid intelligent control system for the unmanned aerial vehicle. Background technique [0002] Nowadays, with the development of various technologies such as flight control and micro-electromechanical systems, quadrotor aircraft are more and more applied to people's daily life. The traditional quadrotor aircraft controls the pitch angle (θ), yaw angle (ψ) and roll angle (φ) of the quadrotor aircraft by adjusting the error between the input quantity and the feedback quantity through PID, so as to complete the body in the horizontal plane. and vertical movement. However, the adjustment process of the traditional cascade PID is too cumbersome and there is no adaptability of self-tuning parameters, and there are often problems such as large errors in the quadrotor control. Comb...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G05D1/10G05D1/08G05B11/42
CPCG05D1/101G05D1/0825G05B11/42
Inventor颜成钢万斌王廷宇孙垚棋张继勇张勇东
OwnerHANGZHOU DIANZI UNIV