

Lower limb rehabilitation robot capable of balancing self-weight and using method thereof
A rehabilitation robot and balance technology, applied in the field of rehabilitation robots, can solve the problems of poor robot size, weight and safety, unsuitable lower limb rehabilitation robots, and higher requirements for driving systems, etc., to improve convenience, rapid disassembly and assembly, and improved comfort. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
[0060] It should be noted that, unless otherwise specified, the technical or scientific terms used in this application shall have the usual meaning understood by those skilled in the art to which the present invention belongs.
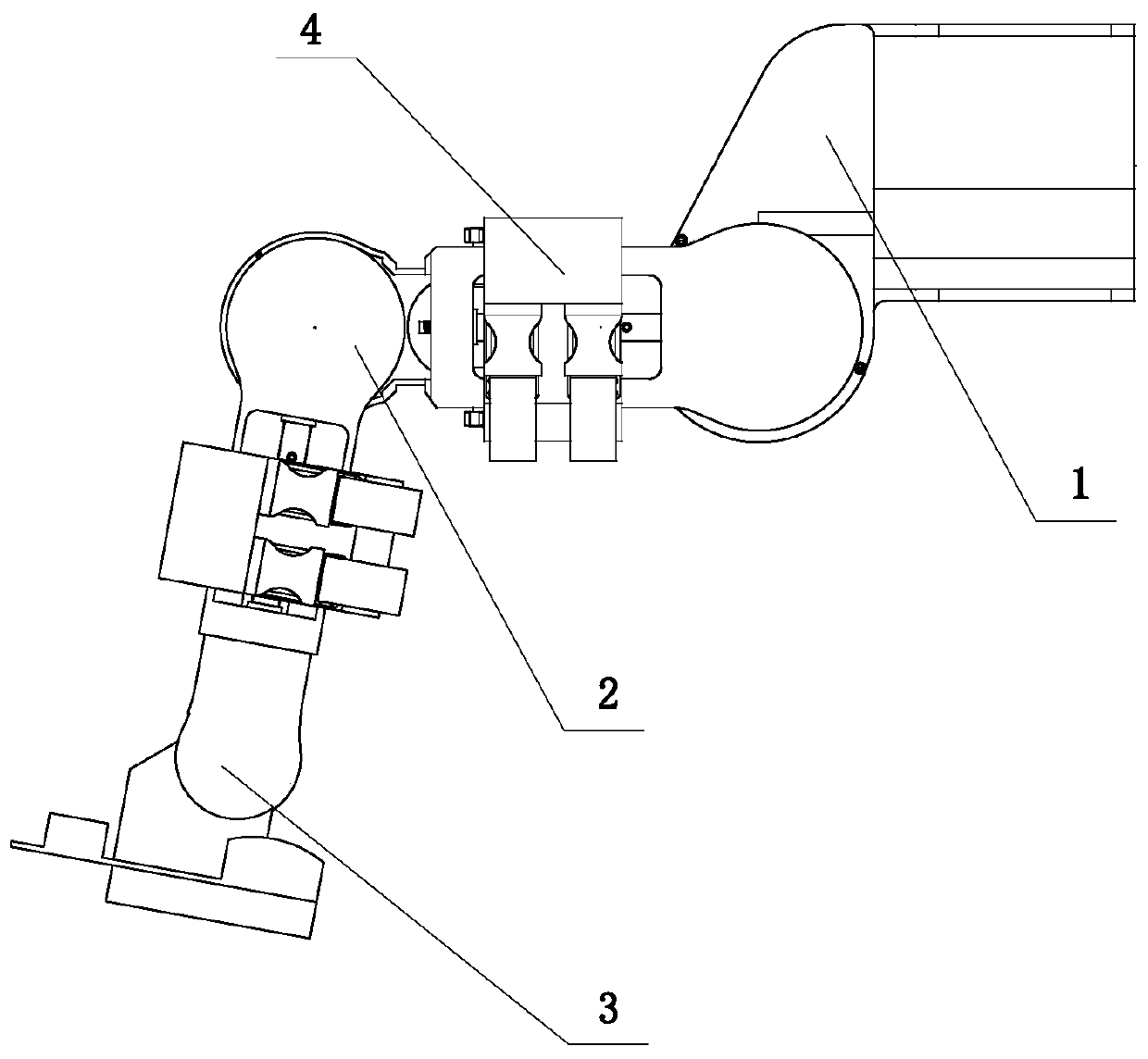
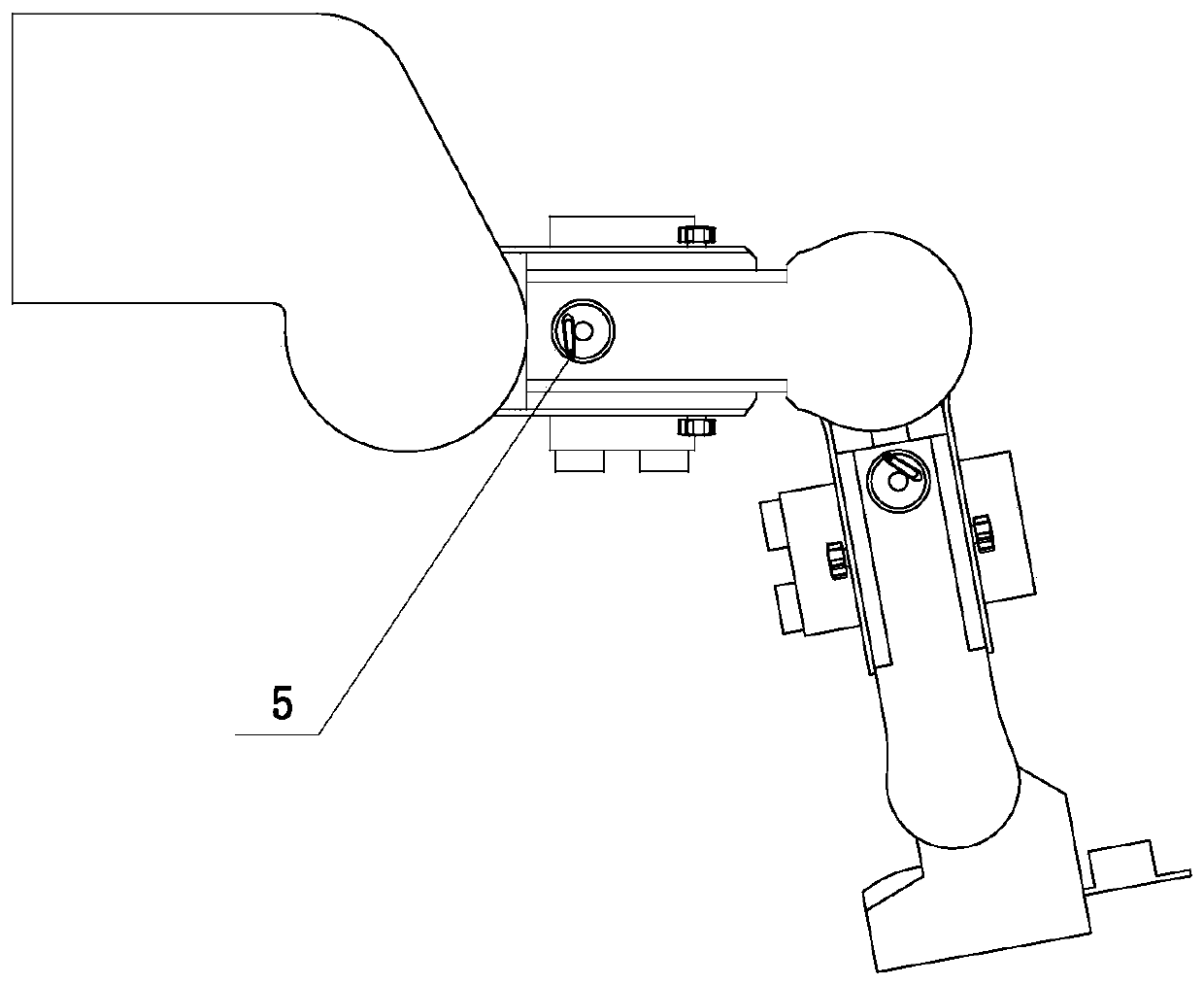
[0061] Such as figure 1 with figure 2 As shown, a lower extremity rehabilitation robot capable of balancing its own weight includes a hip joint assembly with a balancing self-weight device, a knee joint assembly with self-locking protection, an ankle joint assembly with self-locking protection 3, a manual length adjustment assembly 4, and leggings Device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More