String type fruit distributed visual active sensing method and application thereof
A distributed and fruitful technology, applied in the direction of applications, neural learning methods, data processing applications, etc., can solve problems such as redundancy and insufficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
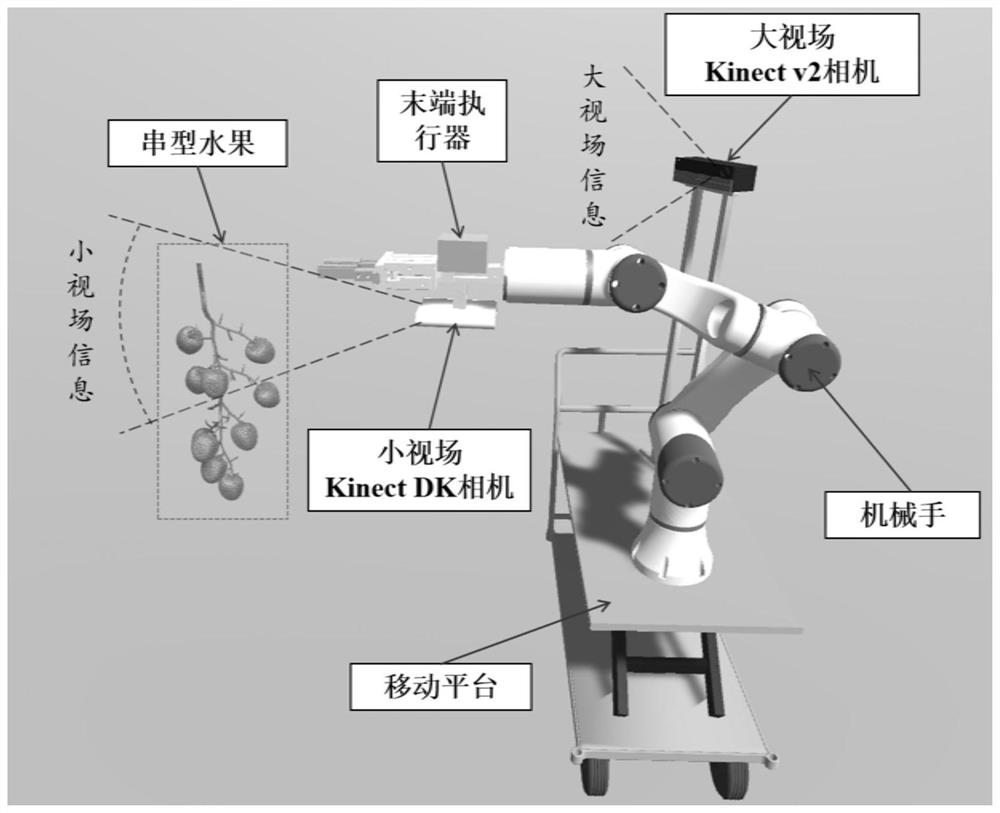
[0062] A string-type fruit picking robot, such as figure 1As shown, it includes manipulator, mobile platform, large field of view camera, small field of view camera and control system; the large field of view camera is Kinect V2 camera, which is vertically fixed on the mobile platform and located on one side of the manipulator, which is relative to the base point of the robot The position of the camera is fixed; the small field of view camera is the Kinect DK camera, which is fixed under the end effector of the manipulator, and its position relative to the base point of the robot changes with the end effector; Perceptual methods for embedded devices.
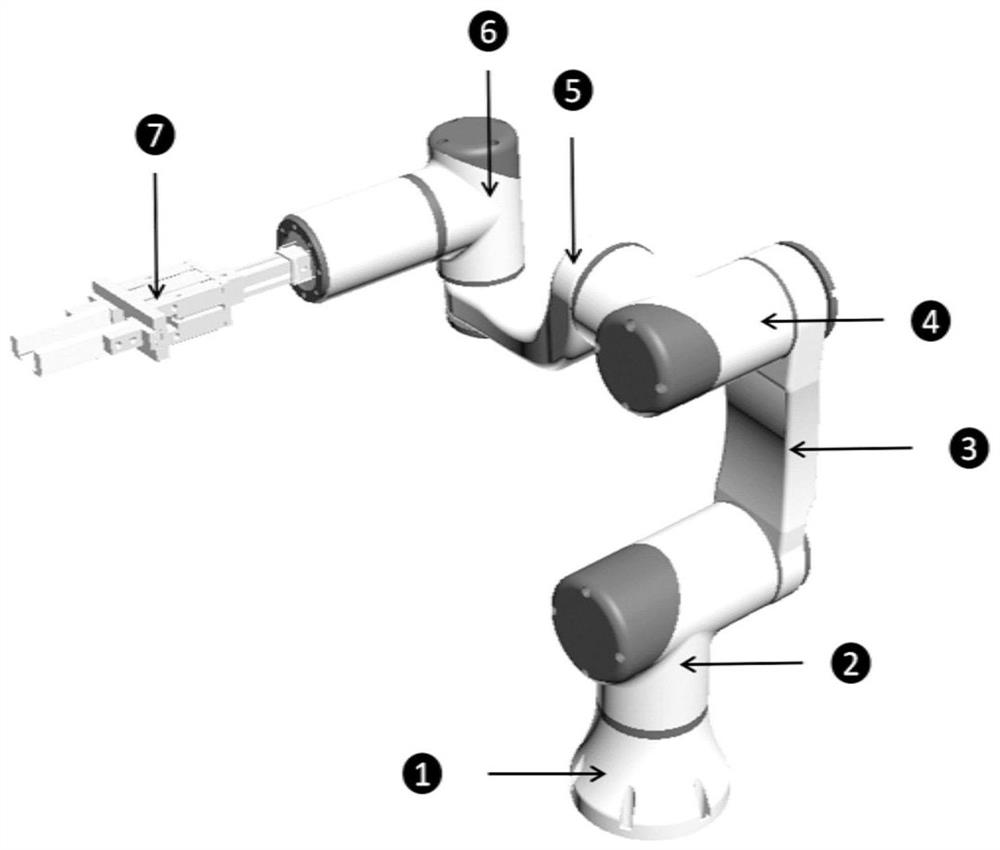
[0063] Such as figure 2 As shown, the body structure of the manipulator includes a base, a J1-J2 module 2, a lower arm 3, a J3-J4 module 4, an upper arm 5, a J5-J6 module 6, and an end effector 7, and these components are connected in sequence.
[0064] The string-shaped fruit picking robot adopts the distributed visual acti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More