

Space rigid body centroid position detection method based on vision and inertia unit fusion
An inertial unit and detection method technology, applied in the testing of machines/structural components, static/dynamic balance testing, measuring devices, etc., can solve the problems of difficult identification of feature points and poor adaptability, and achieve improved robustness and accuracy The effect of high degree and high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
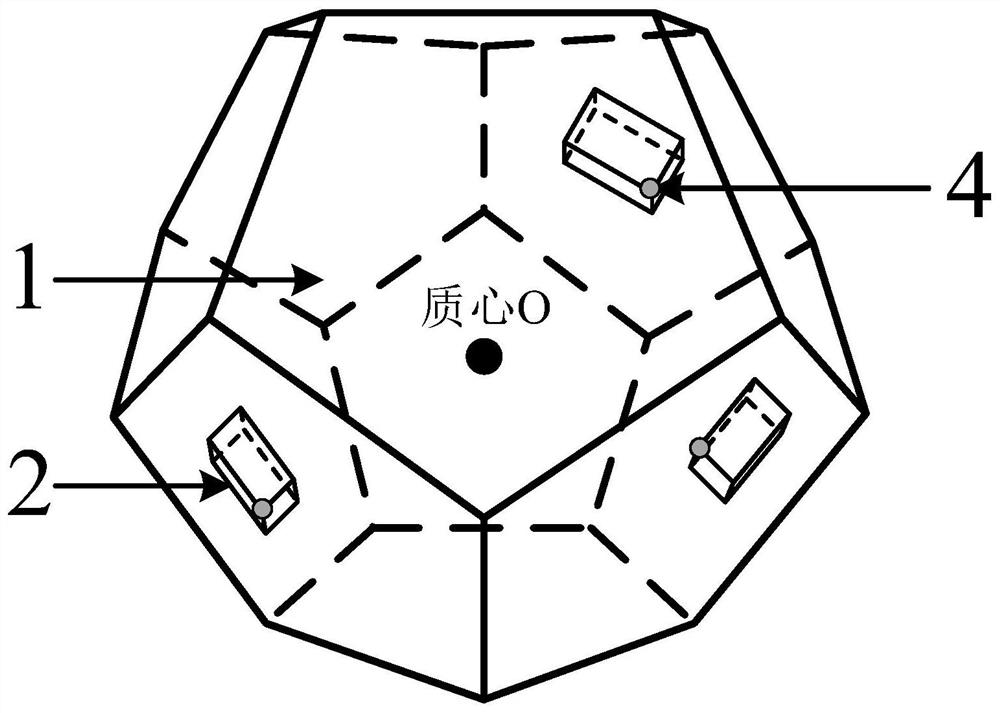
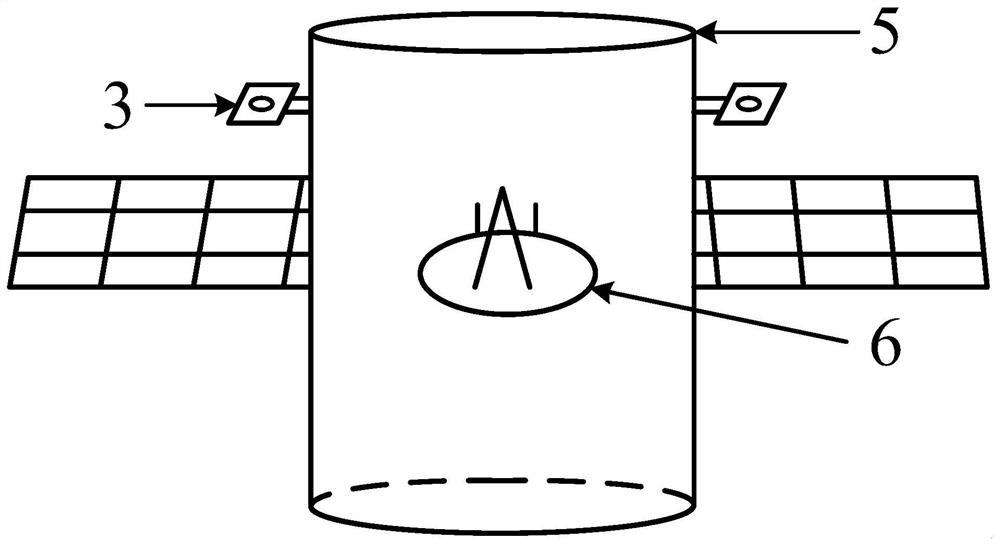
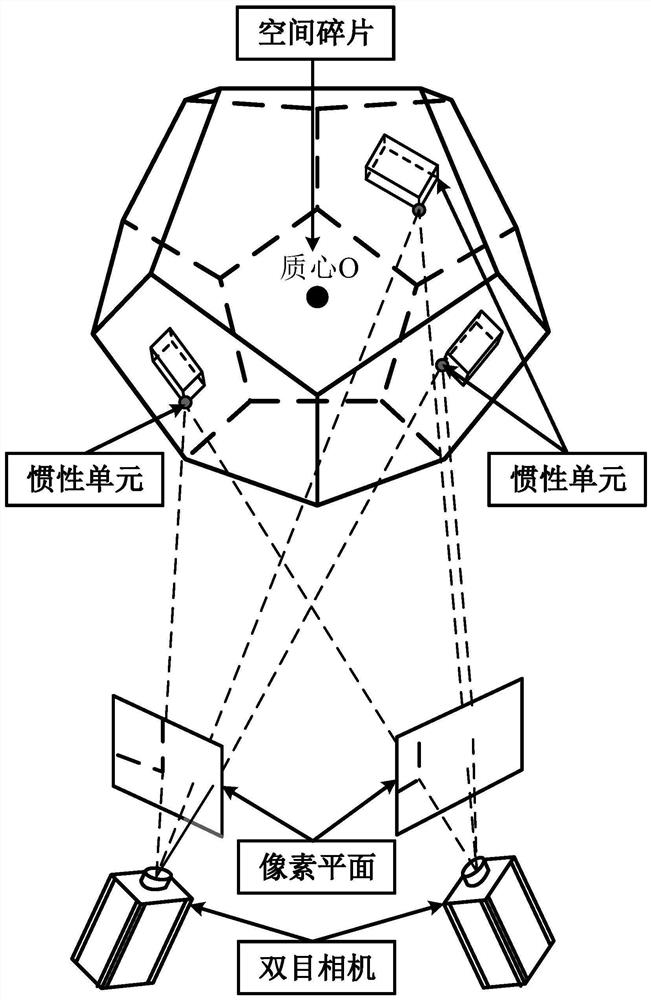
[0053] In the active removal process of space debris, the identification of the change of the center of mass of non-cooperative targets such as space debris, and the identification of the change of the center of mass of the cooperative target such as the derotation device satellite due to the process of extending the mechanical arm and the like, a space rigidity is proposed. The detection method of the position of the center of mass of the body, which can ensure the accuracy of the removal device for the selection of the derotation point of the space debris, and the stability of the derotation equipment after the derotation device is deployed, and ensure the correct execution of the removal device and the space debris in the derotation proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More