

Improved ant colony algorithm and dynamic window method-based hybrid algorithm applied to intelligent vehicle path planning
A path planning, dynamic window technology, applied in vehicle position/route/height control, motor vehicle, non-electric variable control and other directions, can solve the problems of many convergence iterations, falling into local optimum, etc., to achieve good robustness, enhanced Effects of Accuracy, Good Robustness, and Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following describes several preferred embodiments of the present invention with reference to the accompanying drawings, so as to make the technical content clearer and easier to understand. The present invention can be embodied in many different forms of embodiments, and the protection scope of the present invention is not limited to the embodiments mentioned herein.
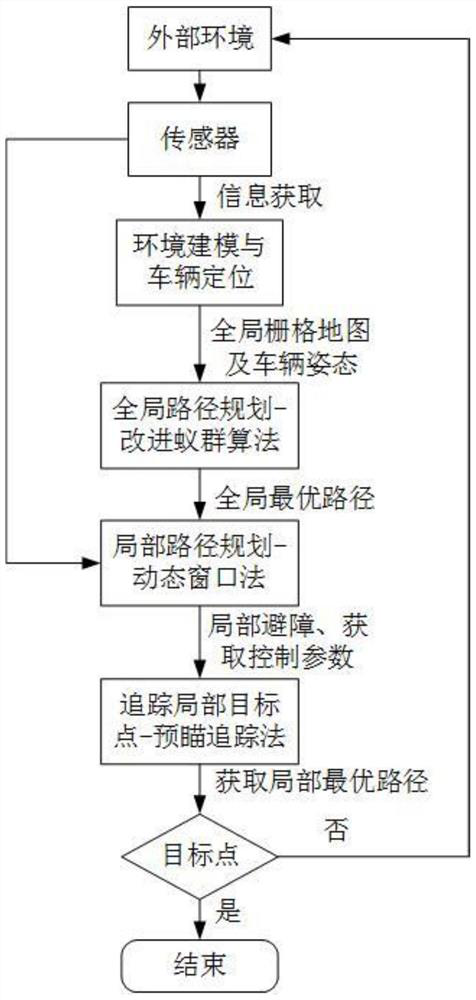
[0052] The hybrid algorithm based on the improved ant colony algorithm and the dynamic window method proposed by the present invention, which is applied to the path planning of the smart car, can realize the real-time obstacle avoidance of the smart car, smooth the turning angle of the path, improve the planning efficiency of the path, and realize the automatic control of the smart car. feedback control. The flow chart of the mixed algorithm based on the improved ant colony algorithm and the dynamic window method proposed by the present invention is as follows figure 1 As shown, the specific steps ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More