

Heavy-load truss transfer robot
A technology for handling robots and trusses, which is used in manipulators, program-controlled manipulators, non-electric welding equipment, etc., can solve the problems of high feeding cost and low feeding efficiency, save labor, accurate and efficient feeding process, and reduce processing costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
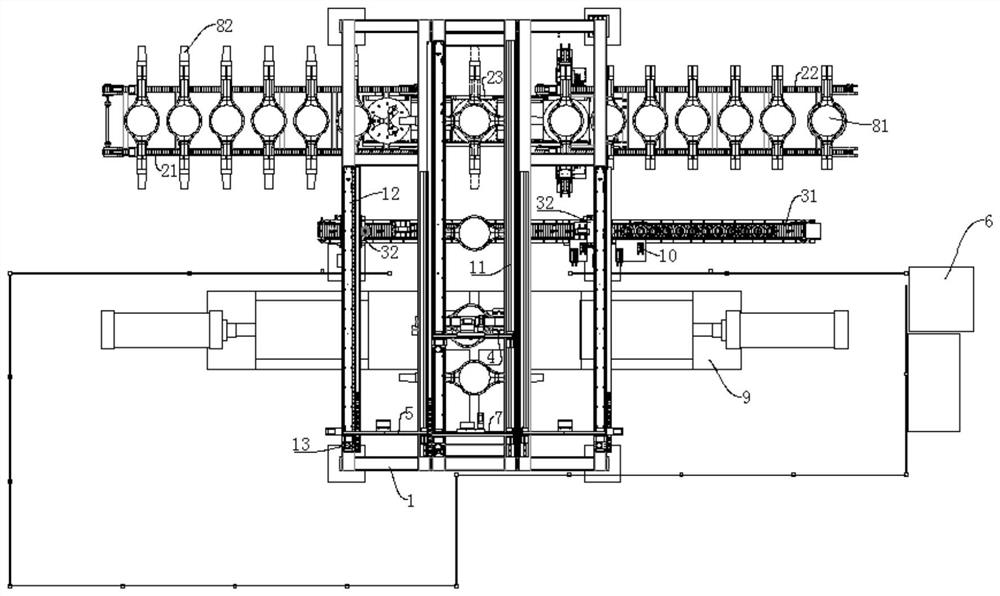
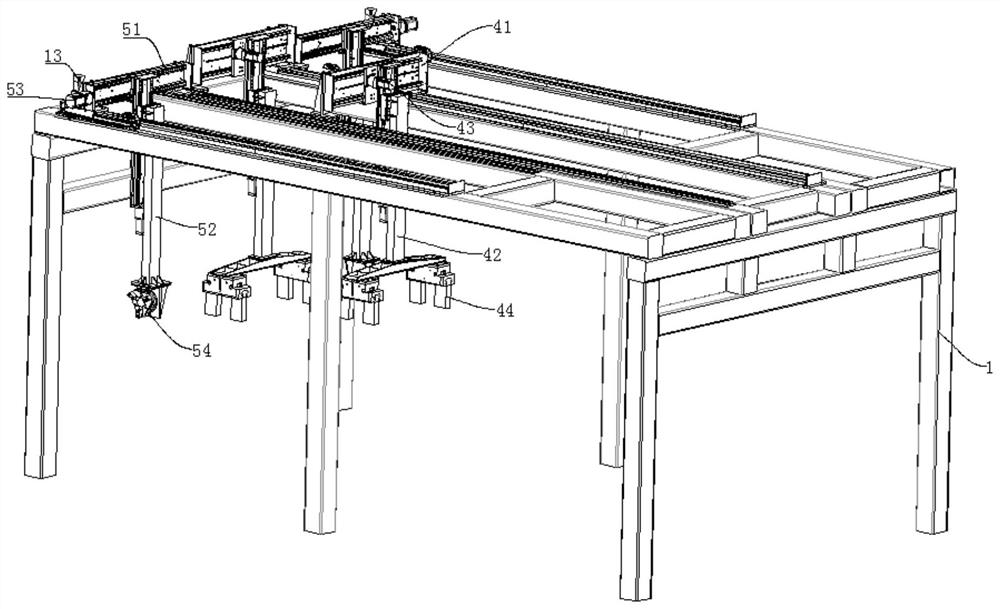
[0027] Such as Figure 1 to Figure 4 As shown, a heavy-duty truss handling robot includes a truss 1, an axle housing conveying device, a shaft head feeding device, an axle housing grabbing manipulator, and a shaft head feeding manipulator, and the axle housing conveying device and The shaft head feeding device and the axle housing conveying device are located in front of the shaft head feeding device, and the clamping welding area is formed under the rear part of the truss 1 .
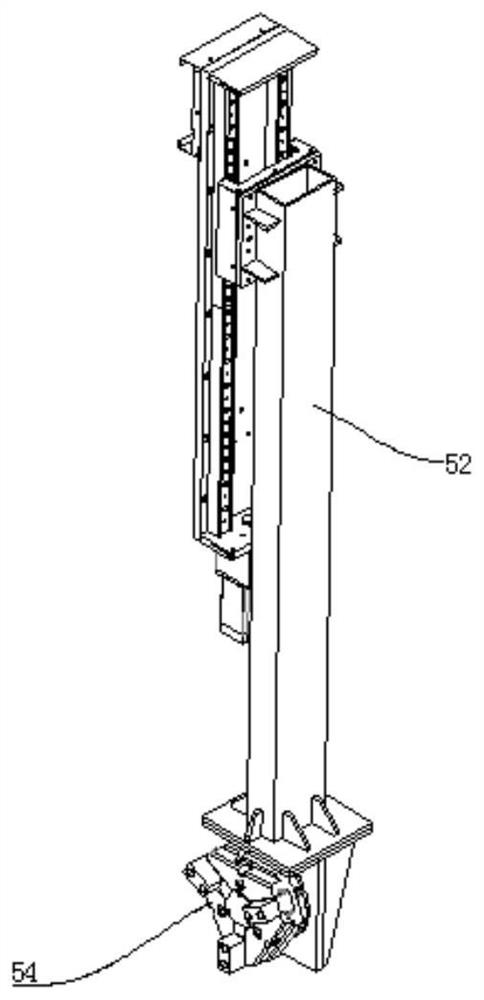
[0028] The top of the truss 1 is provided with a first slide rail 11 between the axle housing conveying device and the clamping welding area, and the axle housing grabbing manipulator is slid on the first slide rail 11, and the axle housing grabbing manipulator includes a first support beam 41, The first lifting arm 42, the second driving device 43 and the mechanical gripper 44, the first support beam 41 is arranged laterally and slides on the first slide rail 11, and the upper end of the first lifting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More