Robotic stereotactic system for mri-guided neurosurgery
A technology of surgical robot and guiding part, which is applied in the field of medical robotics and can solve problems such as surgical accuracy in complex workflows
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
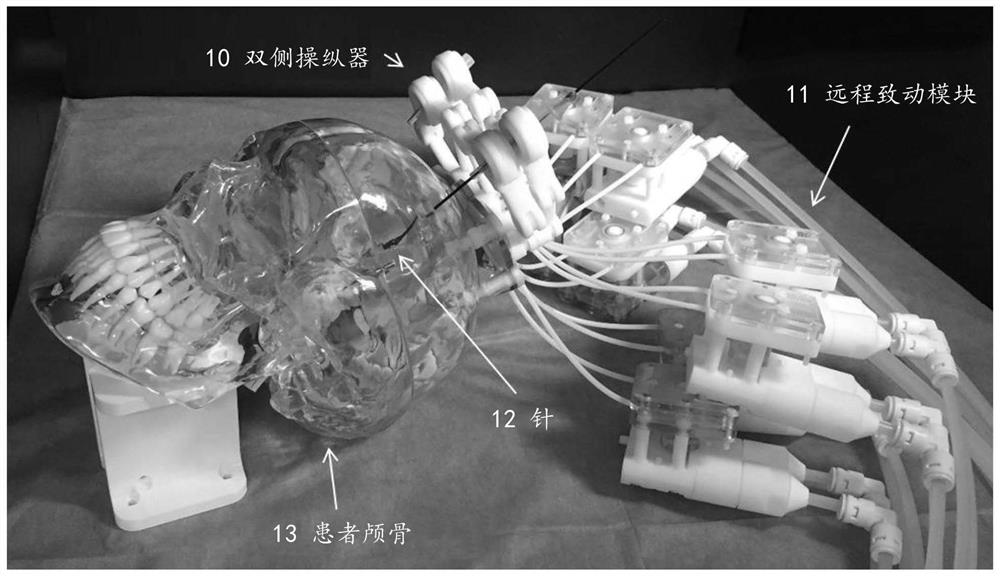
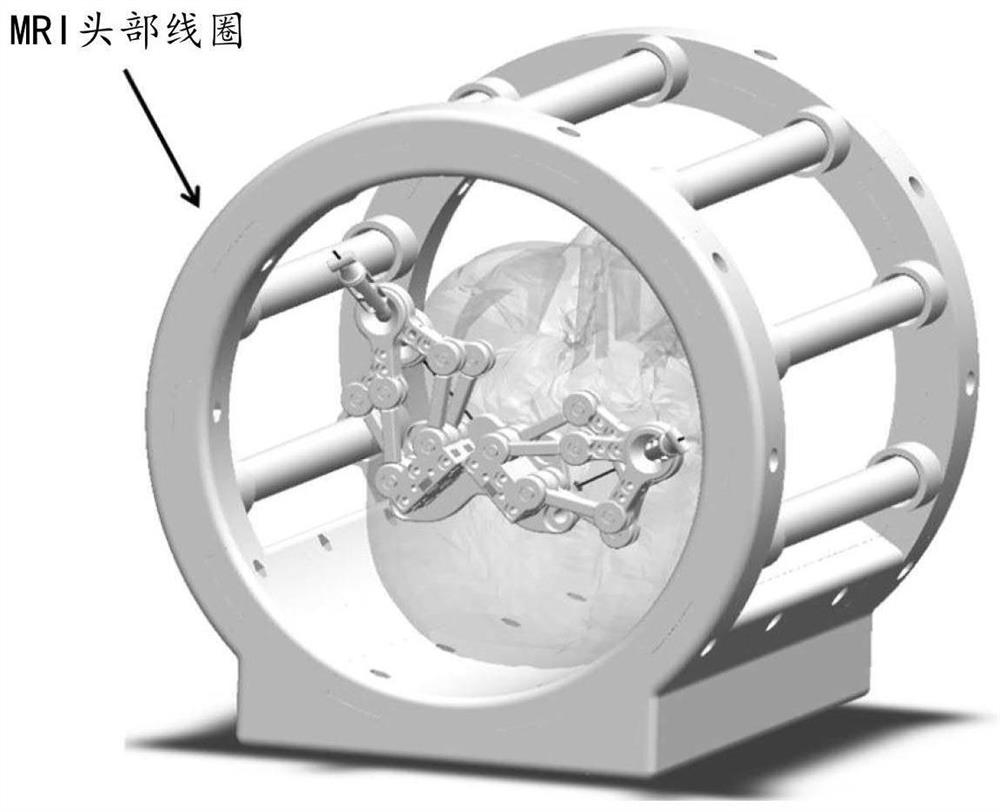
[0059] Example 1. A surgical robot for magnetic resonance imaging-guided intervention comprising:
[0060] Manipulators, including a cord-based upper actuator and a tendon-based lower actuator;
[0061] Mount the base, connected to the lower actuator;
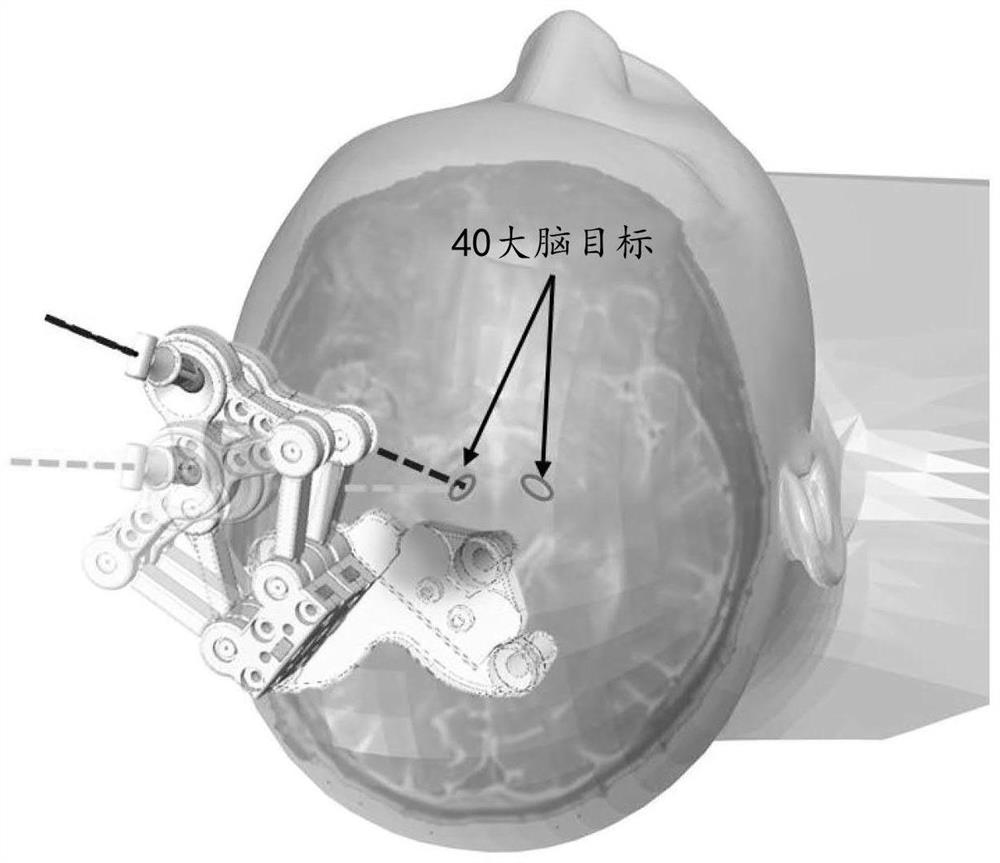
[0062] a needle guide; and
[0063] a needle disposed within the needle guide;
[0064] Each of these actuators includes:
[0065] an outer shell, with openings to allow passage of tendon cords,
[0066] Two swivel unions, connected to the housing,
[0067] two upper arms, each connected to two swivel joints,
[0068] two forearms, respectively connected to the two upper arms at the proximal end of each forearm by a passive joint, and a passive ball joint, connecting the two forearms at the distal end of each forearm, wherein the needle guide is provided on the upper actuator and In the ball joint of the lower actuator, and where the mounting base has multiple screw holes for bone mounting.
Embodiment 2
[0069] Embodiment 2. The surgical robot of embodiment 1, further comprising a needle stop and / or a linear actuator disposed on the needle.
Embodiment 3
[0070] Embodiment 3. The surgical robot of any of embodiments 1-2, further comprising one or more MR-based trackers disposed on the needle guide.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More