

Multi-sensor real-time fusion method for mobile robot remote takeover scene
A mobile robot and multi-sensor technology, applied to color TV parts, TV system parts, TVs, etc., can solve problems such as redundant data, lost distance information, and inability to meet application scenarios, so as to speed up transmission, The effect of removing redundant data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
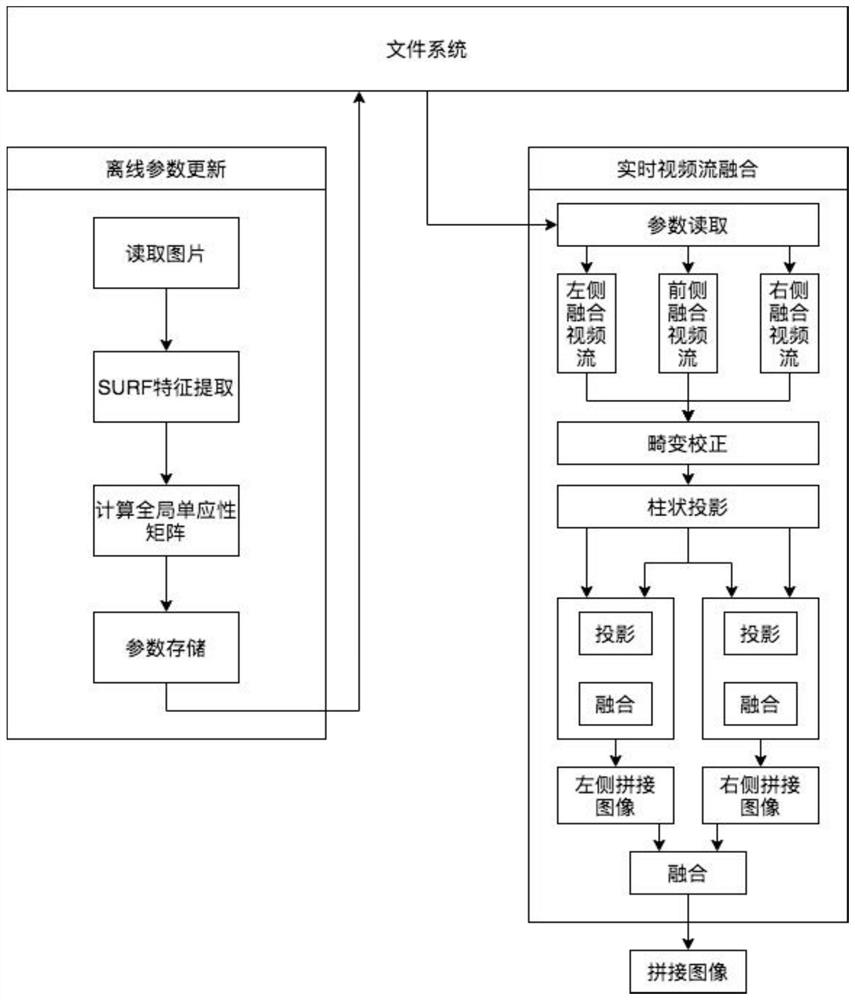
[0040] Such as figure 1 As shown, the present invention is oriented to a multi-sensor real-time fusion method for a remote takeover scene of a mobile robot, which specifically includes the following steps:
[0041] Step 1: The intelligent mobile robot uses three cameras whose positions are relatively fixed.
[0042] In the remote takeover scenario, the camera can collect visual information, but it will lose important distance information. At the same time, it performs poorly in harsh environments and weather. The laser radar can collect accurate distance information, but the resolution is low. The present invention uses Lidar and three monocular cameras make up for the lack of a single sensor. One of the cameras is facing the front, and the other two ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More