Automatic grinding robot for spiral welds at pipe end of spiral steel pipe
A technology of spiral welds and spiral steel pipes, which is applied in the direction of grinding racks, grinding machine parts, grinding machines, etc., can solve the problems of unsatisfactory weld bead quality at the end of spiral steel pipes, and achieve high power utilization of machine tools, maintenance Smooth grinding surface and high productivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
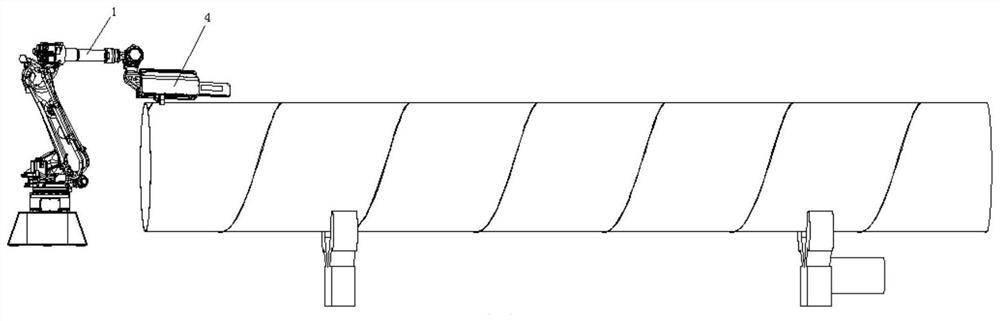
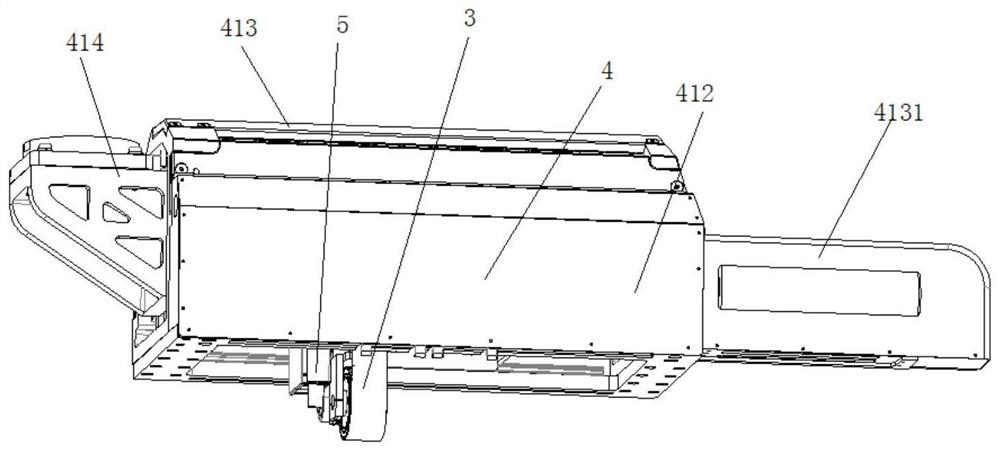
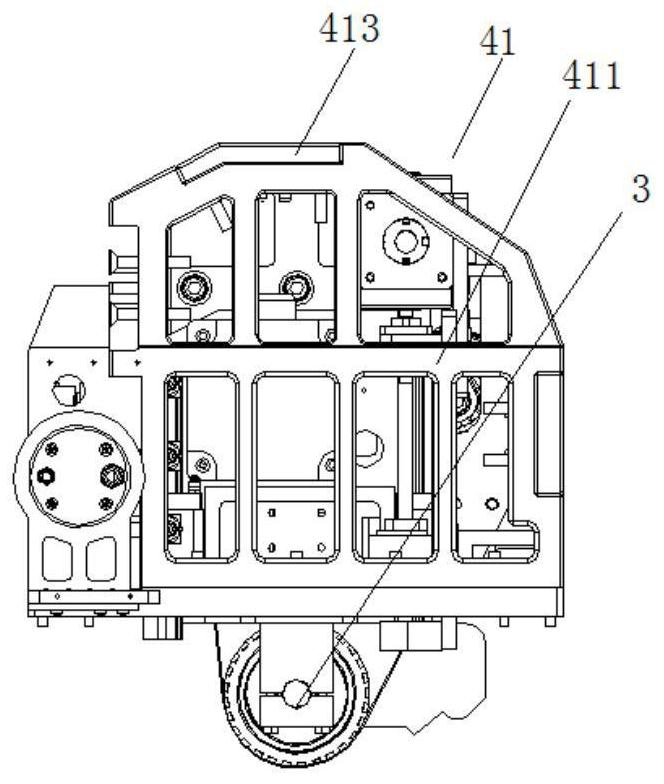
[0063] Attached below Figure 1-35 Specific examples of the present invention are described. It should be understood that the embodiments described below are only illustrative rather than specific limitations on the present invention.
[0064] The following examples facilitate a better understanding of the present invention, but do not limit the present invention. The experimental methods in the following examples are conventional methods unless otherwise specified. The components and materials used in the following examples are commercially available unless otherwise specified. The implementation of the control circuit in the following embodiments is a conventional control method unless otherwise specified.
[0065] In the present invention, unless stated otherwise, it should be understood that the terms "center", "upper", "lower", "front", "rear", "left", "right", "vertical The orientations or positional relationships indicated by "straight", "horizontal", "top", "bottom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com