

Indoor environment 3D semantic map construction method based on point cloud deep learning
An indoor environment, semantic map technology, applied in image analysis, image enhancement, neural architecture, etc., can solve the problem of no semantic perception ability or complex and indirect semantic acquisition method, poor adaptability to dynamic scenes, non-topological map structure navigation and obstacle avoidance, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in detail below in conjunction with the embodiments and accompanying drawings, but the present invention is not limited thereto.
[0056] The hardware environment required for the operation of the whole method system is Kinect2.0 depth sensor, CPU i7-8700k, and a server with GTX1080Ti GPU; the software environment is Ubuntu16.04Linux operating system, ROS robot development environment, ORB-SLAM2 open source framework, OpenCV open source vision library, and CUDA, cuDNN, Tensorflow and other deep learning environments for 3D object detection. In addition, there are necessary third-party dependent libraries such as DBoW2 visual dictionary library, map display library Pangolin, and graph optimization library g2o.
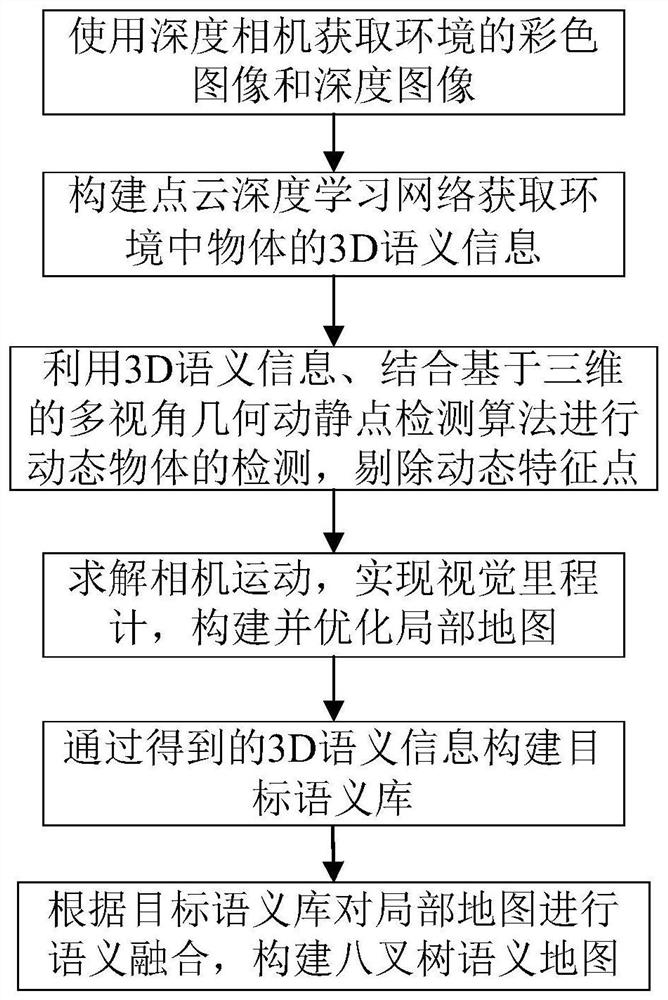
[0057] Such as figure 1 As shown, a method for building a 3D semantic map of an indoor environment based on point cloud deep learning, the main implementation includes the following steps:
[0058] (1) Use a depth camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More