Unmanned aerial vehicle formation cooperative control system and method based on distributed architecture
A distributed architecture and collaborative control technology, applied in general control systems, control/regulation systems, controllers with specific characteristics, etc. Information exchange and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
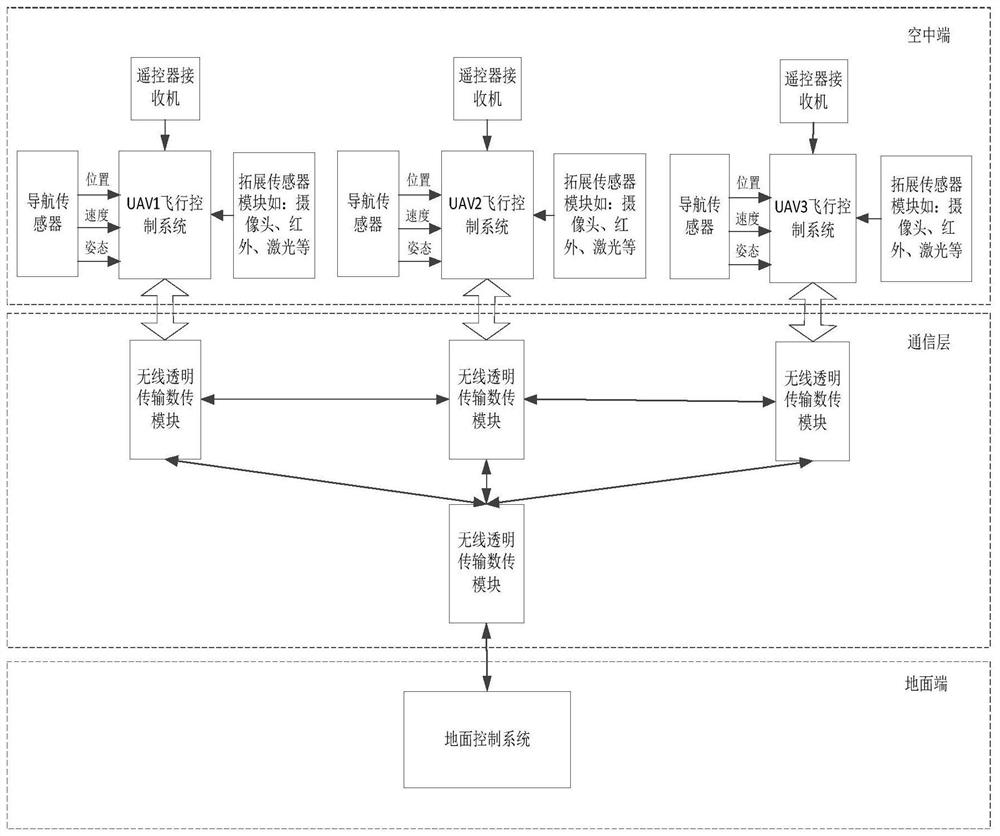
[0109] A UAV formation cooperative control system based on a distributed architecture, which is a multi-UAV architecture. Such as figure 1 As shown, including: air terminal, communication layer and ground terminal. The air terminal includes: a plurality of unmanned aerial vehicles, a single unmanned aerial vehicle system arranged on each unmanned aerial vehicle node, and the single unmanned aerial vehicle system includes a perception layer and a control layer for obtaining the information of the unmanned aerial vehicle. Attitude, speed and position, the perception layer uses the Extended Kalman Filter (EKF, Extended Kalman Filter) algorithm for multi-sensor data fusion, the input is IMU (IMU, Inertial Measurement Unit) and GPS (Global Position System), after fusion After that, higher frequency and more accurate navigation data can be obtained, including attitude, velocity and position. The sensor is a navigation sensor module, a flight control system module, a receiver modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com